正在加载图片...
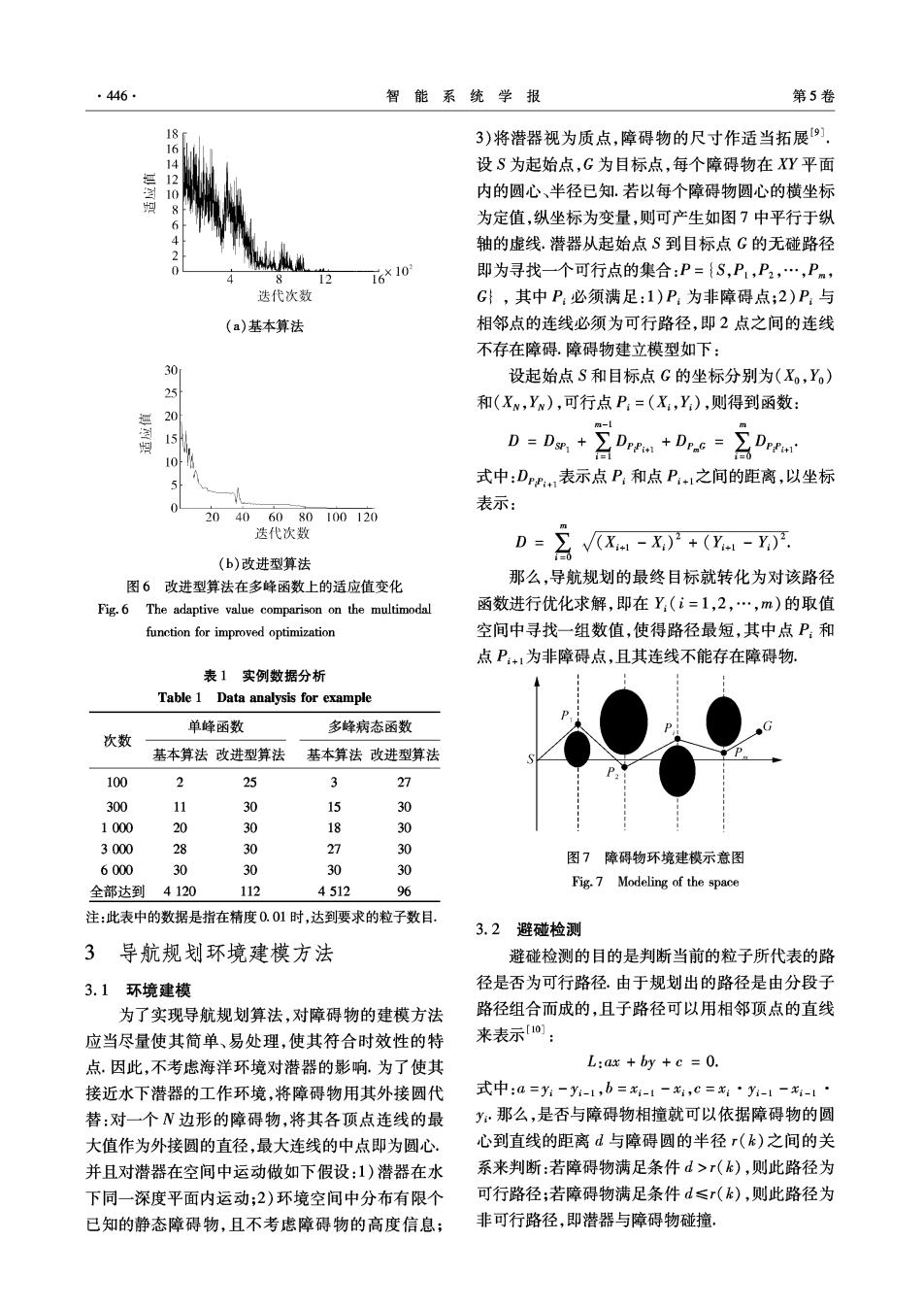
·446. 智能系统学报 第5卷 3)将潜器视为质点,障碍物的尺寸作适当拓展. 16 42 设S为起始点,G为目标点,每个障碍物在XY平面 10 内的圆心、半径已知.若以每个障碍物圆心的横坐标 8 6 为定值,纵坐标为变量,则可产生如图7中平行于纵 轴的虚线.潜器从起始点S到目标点G的无碰路径 2 12 16*10 即为寻找一个可行点的集合:P={S,P,P2,…,Pm, 迭代次数 G,其中P必须满足:1)P:为非障碍点;2)P与 (a)基本算法 相邻点的连线必须为可行路径,即2点之间的连线 不存在障碍.障碍物建立模型如下: 30 设起始点S和目标点G的坐标分别为(X,Y) 25 和(Xw,Yw),可行点P=(X,Y),则得到函数: 延 15 10 D=DaDrha Drs Drra 式中:Dr,表示点P和点P+之间的距离,以坐标 表示: 20 406080100120 迭代次数 D=> √(X41-X)2+(Y1-Y). (b)改进型算法 那么,导航规划的最终目标就转化为对该路径 图6改进型算法在多峰函数上的适应值变化 Fig.6 The adaptive value comparison on the multimodal 函数进行优化求解,即在Y(i=1,2,…,m)的取值 function for improved optimization 空间中寻找一组数值,使得路径最短,其中点P:和 点P:+1为非障碍点,且其连线不能存在障碍物, 表1实例数据分析 Table 1 Data analysis for example 单峰函数 多峰病态函数 次数 基本算法改进型算法 基本算法改进型算法 100 2 25 3 27 300 30 15 30 1000 20 30 18 30 3000 28 30 27 30 图7障碍物环境建模示意图 6000 30 30 30 30 Fig.7 Modeling of the space 全部达到4120 112 4512 96 注:此表中的数据是指在精度0.01时,达到要求的粒子数目. 3.2避碰检测 3导航规划环境建模方法 避碰检测的目的是判断当前的粒子所代表的路 3.1环境建模 径是否为可行路径.由于规划出的路径是由分段子 为了实现导航规划算法,对障碍物的建模方法 路径组合而成的,且子路径可以用相邻顶点的直线 应当尽量使其简单、易处理,使其符合时效性的特 来表示o: 点.因此,不考虑海洋环境对潜器的影响.为了使其 L:ax +by +c =0. 接近水下潜器的工作环境,将障碍物用其外接圆代 式中:a=y:-y-1,b=-1-,c=·y-1-x-1 替:对一个N边形的障碍物,将其各顶点连线的最 y·那么,是否与障碍物相撞就可以依据障碍物的圆 大值作为外接圆的直径,最大连线的中点即为圆心 心到直线的距离d与障碍圆的半径r(k)之间的关 并且对潜器在空间中运动做如下假设:1)潜器在水 系来判断:若障碍物满足条件d>r(k),则此路径为 下同一深度平面内运动;2)环境空间中分布有限个 可行路径;若障碍物满足条件d≤r(k),则此路径为 已知的静态障碍物,且不考虑障碍物的高度信息; 非可行路径,即潜器与障碍物碰撞