正在加载图片...
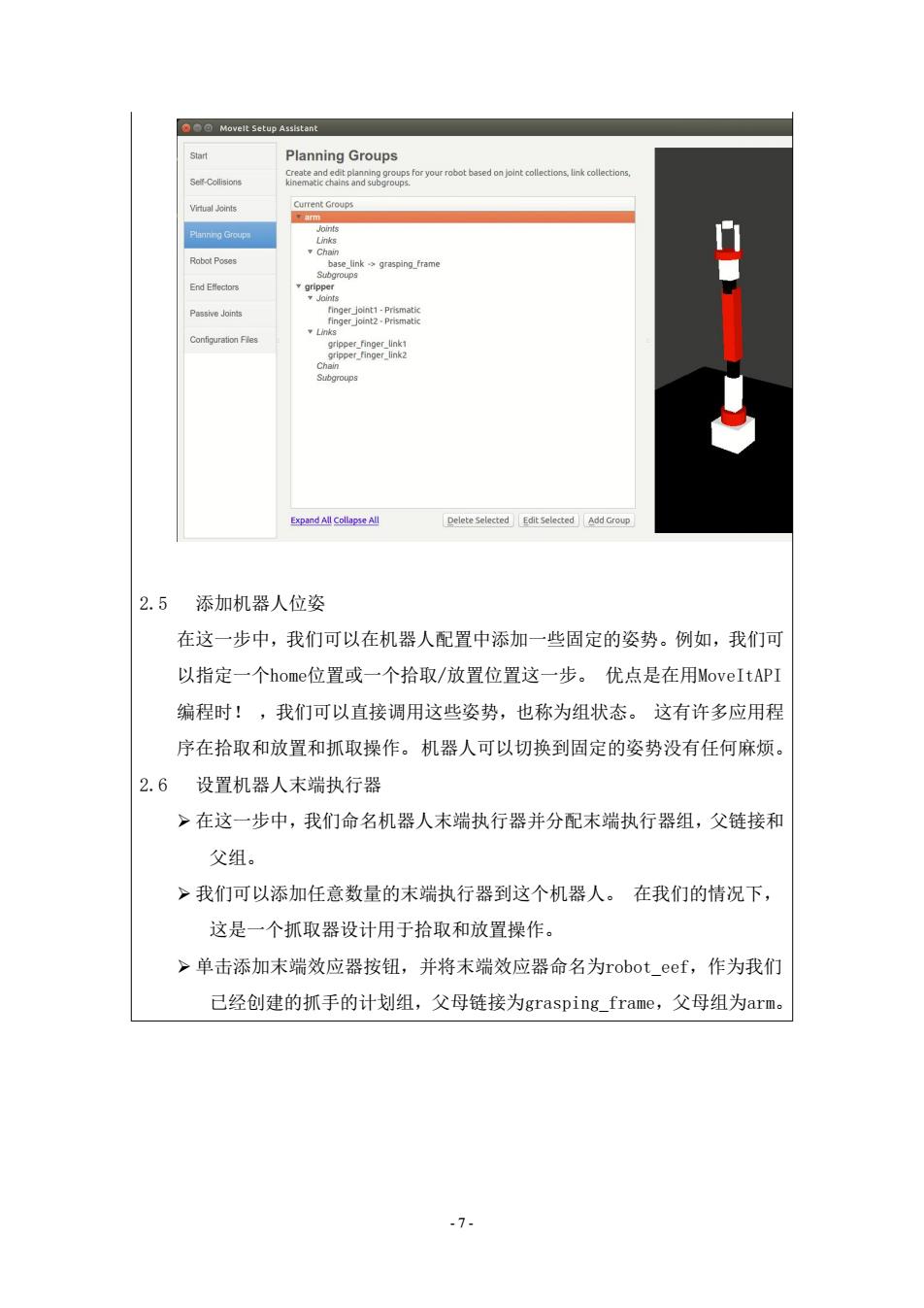
Movelt Setup Assistant Start Planning Groups Ser-Collisions e2prha2g8eorourobotasedoaetolecdonskeoletoas Virtual Joints Current Groups arm Plannmg Groups joints Links Chain Robot Poses base link>grasping frame Subgroups Passive Joints finger_joint1-Prismatic nger_joint2.Prismatic Configuration Fles Links ripper_finger_link1 gripper_finger_link2 Chain Subgroups Expand All Collapse All Delete Selected Edit Selected Add Group 2.5 添加机器人位姿 在这一步中,我们可以在机器人配置中添加一些固定的姿势。例如,我们可 以指定一个home位置或一个拾取/放置位置这一步。优点是在用MoveItAPI 编程时!,我们可以直接调用这些姿势,也称为组状态。这有许多应用程 序在拾取和放置和抓取操作。机器人可以切换到固定的姿势没有任何麻烦。 2.6设置机器人末端执行器 >在这一步中,我们命名机器人末端执行器并分配末端执行器组,父链接和 父组。 >我们可以添加任意数量的末端执行器到这个机器人。在我们的情况下, 这是一个抓取器设计用于拾取和放置操作。 >单击添加末端效应器按钮,并将末端效应器命名为robot eef,作为我们 已经创建的抓手的计划组,父母链接为grasping frame,父母组为arm。 -7-- 7 - 2.5 添加机器人位姿 在这一步中,我们可以在机器人配置中添加一些固定的姿势。例如,我们可 以指定一个home位置或一个拾取/放置位置这一步。 优点是在用MoveItAPI 编程时! ,我们可以直接调用这些姿势,也称为组状态。 这有许多应用程 序在拾取和放置和抓取操作。机器人可以切换到固定的姿势没有任何麻烦。 2.6 设置机器人末端执行器 在这一步中,我们命名机器人末端执行器并分配末端执行器组,父链接和 父组。 我们可以添加任意数量的末端执行器到这个机器人。 在我们的情况下, 这是一个抓取器设计用于拾取和放置操作。 单击添加末端效应器按钮,并将末端效应器命名为robot_eef,作为我们 已经创建的抓手的计划组,父母链接为grasping_frame,父母组为arm