正在加载图片...
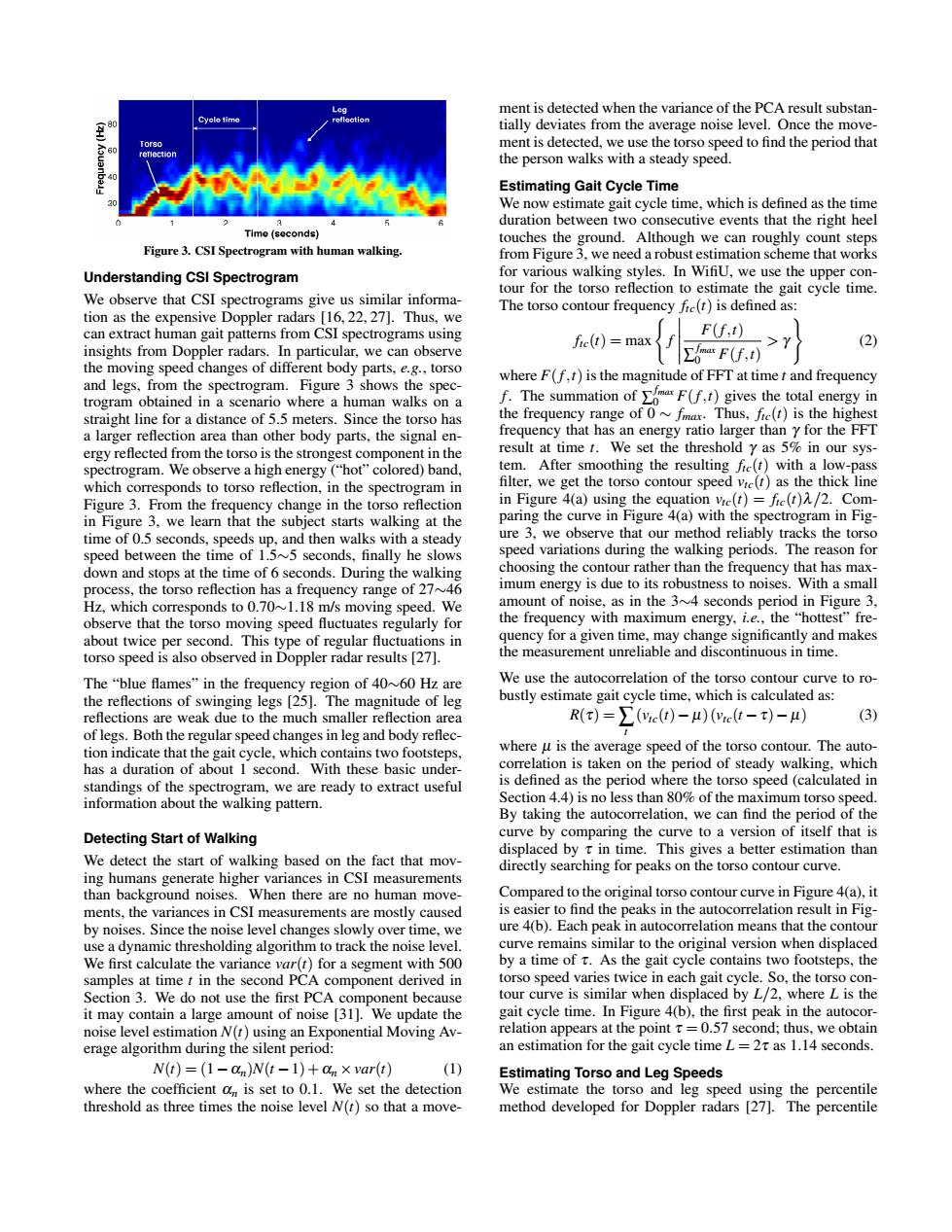
ment is detected when the variance of the PCA result substan- 80 tially deviates from the average noise level.Once the move- ment is detected,we use the torso speed to find the period that 60 the person walks with a steady speed. Estimating Gait Cycle Time We now estimate gait cycle time,which is defined as the time duration between two consecutive events that the right heel Time (seconds) touches the ground.Although we can roughly count steps Figure 3.CSI Spectrogram with human walking. from Figure 3,we need a robust estimation scheme that works Understanding CSI Spectrogram for various walking styles.In WifiU,we use the upper con- tour for the torso reflection to estimate the gait cycle time. We observe that CSI spectrograms give us similar informa- The torso contour frequency fic(t)is defined as: tion as the expensive Doppler radars [16,22,27].Thus,we can extract human gait patterns from CSI spectrograms using fic(t)=max Ff,)一>Y (2) insights from Doppler radars.In particular,we can observe ∑aFf,t) the moving speed changes of different body parts,e.g.,torso and legs,from the spectrogram.Figure 3 shows the spec- where F(f,t)is the magnitude of FFT at time t and frequency trogram obtained in a scenario where a human walks on a f.The summation of m F(f,t)gives the total energy in straight line for a distance of 5.5 meters.Since the torso has the frequency range of 0~fimar.Thus,fic(t)is the highest a larger reflection area than other body parts,the signal en- frequency that has an energy ratio larger than y for the FFT ergy reflected from the torso is the strongest component in the result at time t.We set the threshold y as 5%in our sys- spectrogram.We observe a high energy ("hot"colored)band, tem.After smoothing the resulting fic(t)with a low-pass which corresponds to torso reflection,in the spectrogram in filter,we get the torso contour speed vre(t)as the thick line Figure 3.From the frequency change in the torso reflection in Figure 4(a)using the equation vre(t)=fic(t)/2.Com- in Figure 3,we learn that the subject starts walking at the paring the curve in Figure 4(a)with the spectrogram in Fig- time of 0.5 seconds,speeds up,and then walks with a steady ure 3,we observe that our method reliably tracks the torso speed between the time of 1.5~5 seconds,finally he slows speed variations during the walking periods.The reason for down and stops at the time of 6 seconds.During the walking choosing the contour rather than the frequency that has max- process,the torso reflection has a frequency range of 27~46 imum energy is due to its robustness to noises.With a small Hz,which corresponds to 0.70~1.18 m/s moving speed.We amount of noise,as in the 3~4 seconds period in Figure 3. observe that the torso moving speed fluctuates regularly for the frequency with maximum energy,i.e.,the"hottest"fre- about twice per second.This type of regular fluctuations in quency for a given time,may change significantly and makes torso speed is also observed in Doppler radar results [27] the measurement unreliable and discontinuous in time. The"blue flames"in the frequency region of 40~60 Hz are We use the autocorrelation of the torso contour curve to ro- the reflections of swinging legs [25].The magnitude of leg bustly estimate gait cycle time,which is calculated as: reflections are weak due to the much smaller reflection area R()=>(vic(t)-H)(vic(t-t)-H) (3) of legs.Both the regular speed changes in leg and body reflec- tion indicate that the gait cycle,which contains two footsteps, where u is the average speed of the torso contour.The auto- has a duration of about 1 second.With these basic under- correlation is taken on the period of steady walking,which standings of the spectrogram,we are ready to extract useful is defined as the period where the torso speed(calculated in information about the walking pattern. Section 4.4)is no less than 80%of the maximum torso speed. By taking the autocorrelation,we can find the period of the Detecting Start of Walking curve by comparing the curve to a version of itself that is displaced by t in time.This gives a better estimation than We detect the start of walking based on the fact that mov- directly searching for peaks on the torso contour curve. ing humans generate higher variances in CSI measurements than background noises.When there are no human move- Compared to the original torso contour curve in Figure 4(a),it ments,the variances in CSI measurements are mostly caused is easier to find the peaks in the autocorrelation result in Fig- by noises.Since the noise level changes slowly over time,we ure 4(b).Each peak in autocorrelation means that the contour use a dynamic thresholding algorithm to track the noise level. curve remains similar to the original version when displaced We first calculate the variance var(t)for a segment with 500 by a time of t.As the gait cycle contains two footsteps,the samples at time t in the second PCA component derived in torso speed varies twice in each gait cycle.So,the torso con- Section 3.We do not use the first PCA component because tour curve is similar when displaced by L/2,where L is the it may contain a large amount of noise [31].We update the gait cycle time.In Figure 4(b),the first peak in the autocor- noise level estimation N(t)using an Exponential Moving Av- relation appears at the point=0.57 second;thus,we obtain erage algorithm during the silent period: an estimation for the gait cycle time L=2t as 1.14 seconds. N(t)=(1-an)N(t-1)+an x var(t) (1) Estimating Torso and Leg Speeds where the coefficient an is set to 0.1.We set the detection We estimate the torso and leg speed using the percentile threshold as three times the noise level N(t)so that a move- method developed for Doppler radars [27].The percentileFigure 3. CSI Spectrogram with human walking. Understanding CSI Spectrogram We observe that CSI spectrograms give us similar information as the expensive Doppler radars [16, 22, 27]. Thus, we can extract human gait patterns from CSI spectrograms using insights from Doppler radars. In particular, we can observe the moving speed changes of different body parts, e.g., torso and legs, from the spectrogram. Figure 3 shows the spectrogram obtained in a scenario where a human walks on a straight line for a distance of 5.5 meters. Since the torso has a larger reflection area than other body parts, the signal energy reflected from the torso is the strongest component in the spectrogram. We observe a high energy (“hot” colored) band, which corresponds to torso reflection, in the spectrogram in Figure 3. From the frequency change in the torso reflection in Figure 3, we learn that the subject starts walking at the time of 0.5 seconds, speeds up, and then walks with a steady speed between the time of 1.5∼5 seconds, finally he slows down and stops at the time of 6 seconds. During the walking process, the torso reflection has a frequency range of 27∼46 Hz, which corresponds to 0.70∼1.18 m/s moving speed. We observe that the torso moving speed fluctuates regularly for about twice per second. This type of regular fluctuations in torso speed is also observed in Doppler radar results [27]. The “blue flames” in the frequency region of 40∼60 Hz are the reflections of swinging legs [25]. The magnitude of leg reflections are weak due to the much smaller reflection area of legs. Both the regular speed changes in leg and body reflection indicate that the gait cycle, which contains two footsteps, has a duration of about 1 second. With these basic understandings of the spectrogram, we are ready to extract useful information about the walking pattern. Detecting Start of Walking We detect the start of walking based on the fact that moving humans generate higher variances in CSI measurements than background noises. When there are no human movements, the variances in CSI measurements are mostly caused by noises. Since the noise level changes slowly over time, we use a dynamic thresholding algorithm to track the noise level. We first calculate the variance var(t) for a segment with 500 samples at time t in the second PCA component derived in Section 3. We do not use the first PCA component because it may contain a large amount of noise [31]. We update the noise level estimation N(t) using an Exponential Moving Average algorithm during the silent period: N(t) = (1−αn)N(t −1) +αn ×var(t) (1) where the coefficient αn is set to 0.1. We set the detection threshold as three times the noise level N(t) so that a movement is detected when the variance of the PCA result substantially deviates from the average noise level. Once the movement is detected, we use the torso speed to find the period that the person walks with a steady speed. Estimating Gait Cycle Time We now estimate gait cycle time, which is defined as the time duration between two consecutive events that the right heel touches the ground. Although we can roughly count steps from Figure 3, we need a robust estimation scheme that works for various walking styles. In WifiU, we use the upper contour for the torso reflection to estimate the gait cycle time. The torso contour frequency ftc(t) is defined as: ftc(t) = max( f
F(f,t) ∑ fmax 0 F(f,t) > γ ) (2) where F(f,t) is the magnitude of FFT at time t and frequency f . The summation of ∑ fmax 0 F(f,t) gives the total energy in the frequency range of 0 ∼ fmax. Thus, ftc(t) is the highest frequency that has an energy ratio larger than γ for the FFT result at time t. We set the threshold γ as 5% in our system. After smoothing the resulting ftc(t) with a low-pass filter, we get the torso contour speed vtc(t) as the thick line in Figure 4(a) using the equation vtc(t) = ftc(t)λ/2. Comparing the curve in Figure 4(a) with the spectrogram in Figure 3, we observe that our method reliably tracks the torso speed variations during the walking periods. The reason for choosing the contour rather than the frequency that has maximum energy is due to its robustness to noises. With a small amount of noise, as in the 3∼4 seconds period in Figure 3, the frequency with maximum energy, i.e., the “hottest” frequency for a given time, may change significantly and makes the measurement unreliable and discontinuous in time. We use the autocorrelation of the torso contour curve to robustly estimate gait cycle time, which is calculated as: R(τ) = ∑t (vtc(t)− µ) (vtc(t −τ)− µ) (3) where µ is the average speed of the torso contour. The autocorrelation is taken on the period of steady walking, which is defined as the period where the torso speed (calculated in Section 4.4) is no less than 80% of the maximum torso speed. By taking the autocorrelation, we can find the period of the curve by comparing the curve to a version of itself that is displaced by τ in time. This gives a better estimation than directly searching for peaks on the torso contour curve. Compared to the original torso contour curve in Figure 4(a), it is easier to find the peaks in the autocorrelation result in Figure 4(b). Each peak in autocorrelation means that the contour curve remains similar to the original version when displaced by a time of τ. As the gait cycle contains two footsteps, the torso speed varies twice in each gait cycle. So, the torso contour curve is similar when displaced by L/2, where L is the gait cycle time. In Figure 4(b), the first peak in the autocorrelation appears at the point τ = 0.57 second; thus, we obtain an estimation for the gait cycle time L = 2τ as 1.14 seconds. Estimating Torso and Leg Speeds We estimate the torso and leg speed using the percentile method developed for Doppler radars [27]. The percentile