正在加载图片...
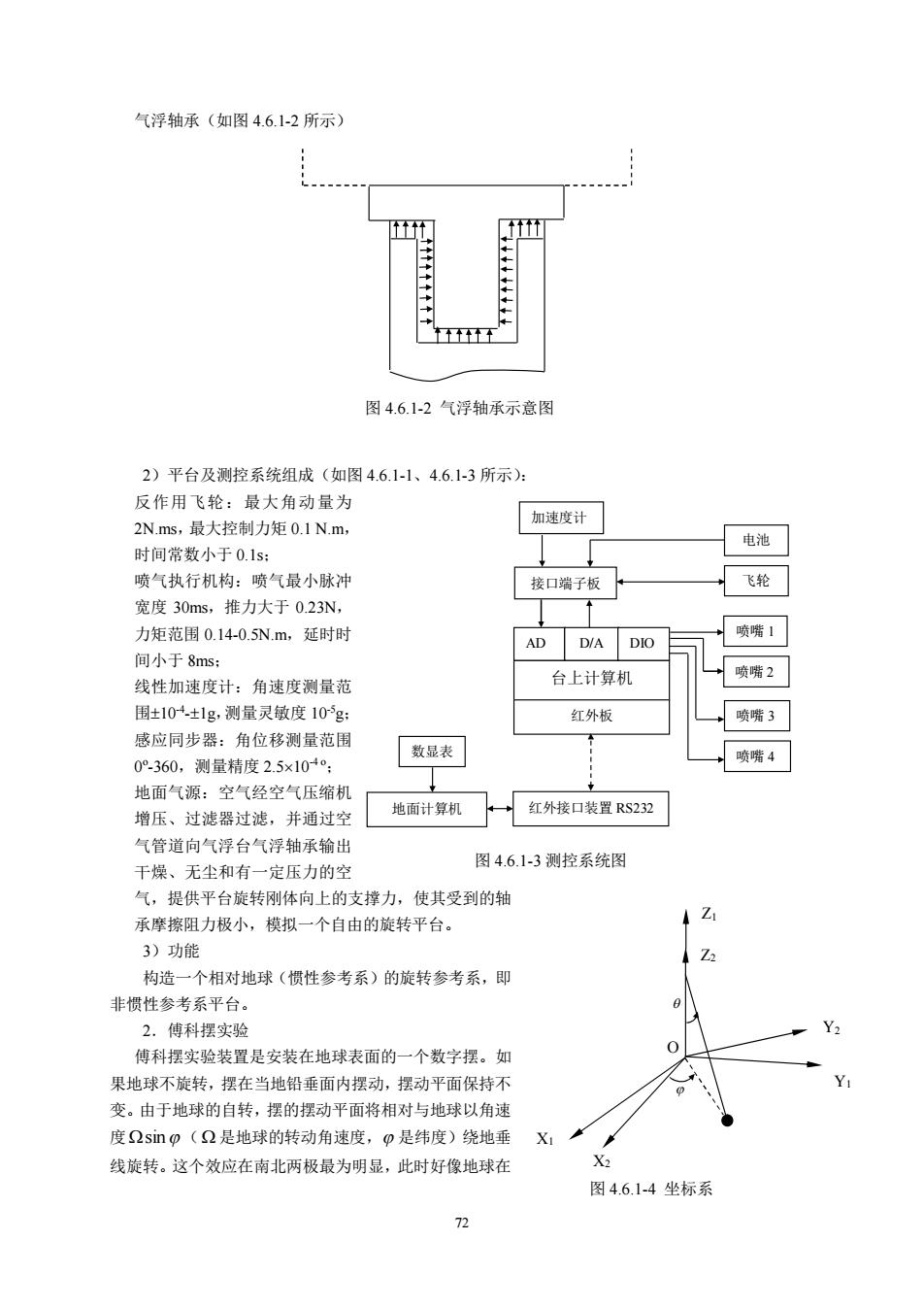
气浮轴承(如图4.6.1-2所示) 图4.6.1-2气浮轴承示意图 2)平台及测控系统组成(如图4.6.1-1、4.6.1-3所示): 反作用飞轮:最大角动量为 加速度计 2N.ms,最大控制力矩0.1N.m, 电池 时间常数小于0.1s: 喷气执行机构:喷气最小脉冲 接口端子板 飞轮 宽度30ms,推力大于0.23N, 力矩范围0.14-0.5N.m,延时时 喷嘴1 AD D/A DIO 间小于8ms: 线性加速度计:角速度测量范 台上计算机 喷嘴2 围±104±1g,测量灵敏度10g: 红外板 喷嘴3 感应同步器:角位移测量范围 数显表 0°-360,测量精度2.5×104: 喷嘴4 地面气源:空气经空气压缩机 地面计算机 红外接口装置RS232 增压、过滤器过滤,并通过空 气管道向气浮台气浮轴承输出 图4.6.1-3测控系统图 干燥、无尘和有一定压力的空 气,提供平台旋转刚体向上的支撑力,使其受到的轴 承摩擦阻力极小,模拟一个自由的旋转平台。 Z 3)功能 Z 构造一个相对地球(惯性参考系)的旋转参考系,即 非惯性参考系平台。 2.傅科摆实验 傅科摆实验装置是安装在地球表面的一个数字摆。如 0 果地球不旋转,摆在当地铅垂面内摆动,摆动平面保持不 变。由于地球的自转,摆的摆动平面将相对与地球以角速 度2sinp(Ω是地球的转动角速度,p是纬度)绕地垂 线旋转。这个效应在南北两极最为明显,此时好像地球在 X2 图4.6.1-4坐标系 7272 气浮轴承(如图 4.6.1-2 所示) 2)平台及测控系统组成(如图 4.6.1-1、4.6.1-3 所示): 反作用飞轮:最大角动量为 2N.ms,最大控制力矩 0.1 N.m, 时间常数小于 0.1s; 喷气执行机构:喷气最小脉冲 宽度 30ms,推力大于 0.23N, 力矩范围 0.14-0.5N.m,延时时 间小于 8ms; 线性加速度计:角速度测量范 围10-4 -1g,测量灵敏度 10-5 g; 感应同步器:角位移测量范围 0 o -360,测量精度 2.510 -4 o ; 地面气源:空气经空气压缩机 增压、过滤器过滤,并通过空 气管道向气浮台气浮轴承输出 干燥、无尘和有一定压力的空 气,提供平台旋转刚体向上的支撑力,使其受到的轴 承摩擦阻力极小,模拟一个自由的旋转平台。 3)功能 构造一个相对地球(惯性参考系)的旋转参考系,即 非惯性参考系平台。 2.傅科摆实验 傅科摆实验装置是安装在地球表面的一个数字摆。如 果地球不旋转,摆在当地铅垂面内摆动,摆动平面保持不 变。由于地球的自转,摆的摆动平面将相对与地球以角速 度sin ( 是地球的转动角速度, 是纬度)绕地垂 线旋转。这个效应在南北两极最为明显,此时好像地球在 图 4.6.1-2 气浮轴承示意图 台上计算机 红外板 AD D/A DIO 接口端子板 加速度计 电池 飞轮 红外接口装置 RS232 喷嘴 1 喷嘴 2 喷嘴 3 喷嘴 4 地面计算机 数显表 图 4.6.1-3 测控系统图 O Z1 Z2 Y2 Y1 X1 X2 图 4.6.1-4 坐标系