正在加载图片...
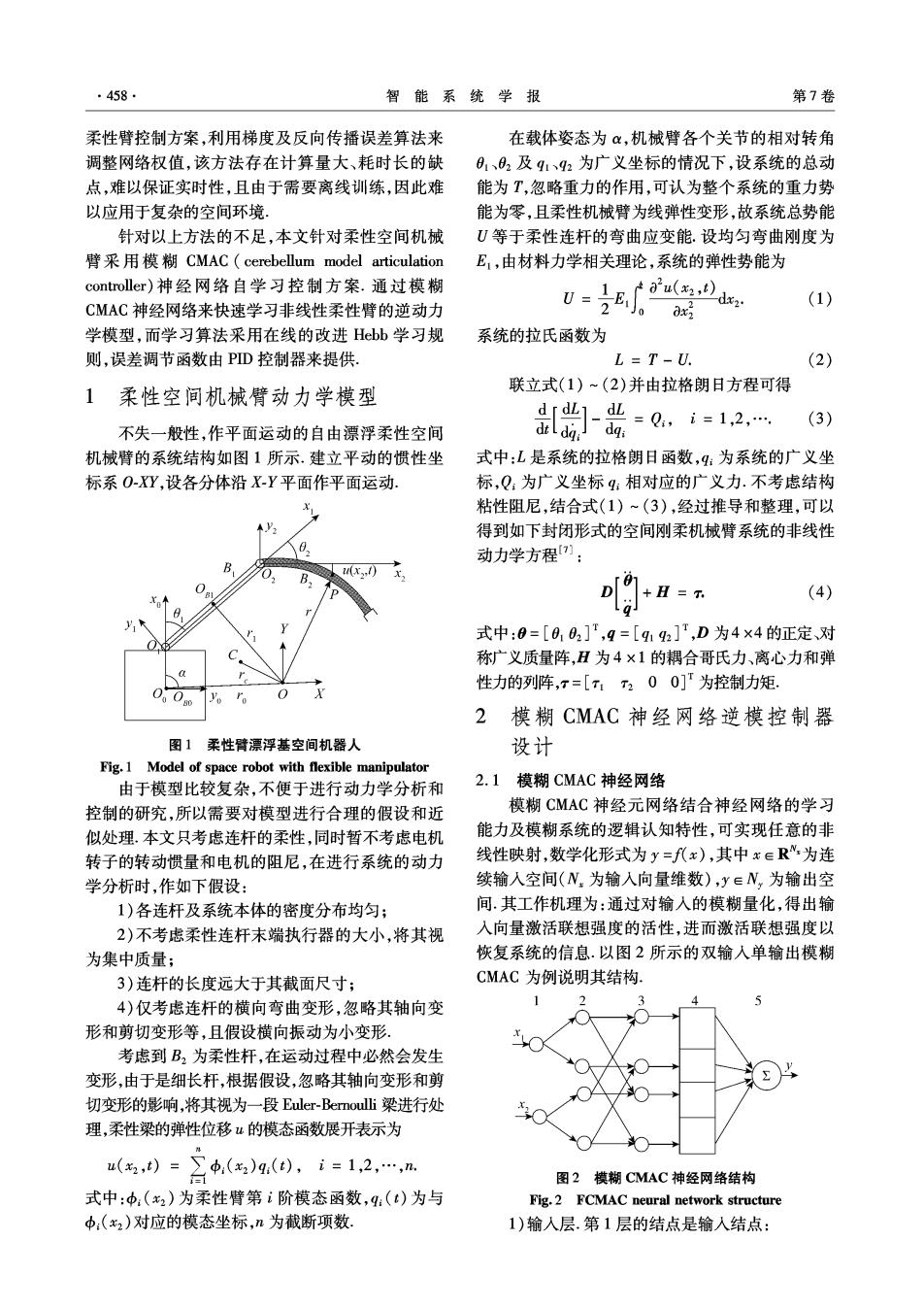
.458 智能系统学报 第7卷 柔性臂控制方案,利用梯度及反向传播误差算法来 在载体姿态为α,机械臂各个关节的相对转角 调整网络权值,该方法存在计算量大、耗时长的缺 0、02及91、92为广义坐标的情况下,设系统的总动 点,难以保证实时性,且由于需要离线训练,因此难 能为T,忽略重力的作用,可认为整个系统的重力势 以应用于复杂的空间环境. 能为零,且柔性机械臂为线弹性变形,故系统总势能 针对以上方法的不足,本文针对柔性空间机械 U等于柔性连杆的弯曲应变能.设均匀弯曲刚度为 臂采用模w糊CMAC(cerebellum model articulation E,由材料力学相关理论,系统的弹性势能为 controller)神经网络自学习控制方案.通过模糊 tu()d (1) CMAC神经网络来快速学习非线性柔性臂的逆动力 学模型,而学习算法采用在线的改进Hbb学习规 系统的拉氏函数为 则,误差调节函数由PD控制器来提供, L=T-U. (2) 联立式(1)~(2)并由拉格朗日方程可得 柔性空间机械臂动力学模型 不失一般性,作平面运动的自由漂浮柔性空间 -斯-0.i=12 (3) 机械臂的系统结构如图1所示.建立平动的惯性坐 式中:L是系统的拉格朗日函数,9:为系统的广义坐 标系O-Y,设各分体沿X-Y平面作平面运动. 标,Q:为广义坐标9:相对应的广义力.不考虑结构 粘性阻尼,结合式(1)~(3),经过推导和整理,可以 得到如下封闭形式的空间刚柔机械臂系统的非线性 动力学方程: D +H= (4) 式中:0=[0102],9=[912],D为4×4的正定对 称广义质量阵,H为4×1的耦合哥氏力、离心力和弹 性力的列阵,x=[:200]T为控制力矩 00 2模糊CMAC神经网络逆模控制器 图1柔性臂漂浮基空间机器人 设计 Fig.1 Model of space robot with flexible manipulator 由于模型比较复杂,不便于进行动力学分析和 2.1模糊CMAC神经网络 控制的研究,所以需要对模型进行合理的假设和近 模糊CMAC神经元网络结合神经网络的学习 似处理.本文只考虑连杆的柔性,同时暂不考虑电机 能力及模糊系统的逻辑认知特性,可实现任意的非 转子的转动惯量和电机的阻尼,在进行系统的动力 线性映射,数学化形式为y=f(x),其中x∈R“为连 学分析时,作如下假设: 续输人空间(N为输人向量维数),y∈N,为输出空 1)各连杆及系统本体的密度分布均匀; 间.其工作机理为:通过对输入的模糊量化,得出输 2)不考虑柔性连杆末端执行器的大小,将其视 入向量激活联想强度的活性,进而激活联想强度以 为集中质量; 恢复系统的信息.以图2所示的双输人单输出模糊 3)连杆的长度远大于其截面尺寸; CMAC为例说明其结构, 4)仅考虑连杆的横向弯曲变形,忽略其轴向变 形和剪切变形等,且假设横向振动为小变形 考虑到B2为柔性杆,在运动过程中必然会发生 变形,由于是细长杆,根据假设,忽略其轴向变形和剪 切变形的影响,将其视为一段Euler-Bernoulli梁进行处 理,柔性梁的弹性位移“的模态函数展开表示为 u(0,)=∑中(x)q.(t),i=1,2,…,n 图2模糊CMAC神经网络结构 式中:中:(x2)为柔性臂第i阶模态函数,9:()为与 Fig.2 FCMAC neural network structure 中:(x2)对应的模态坐标,n为截断项数 1)输人层.第1层的结点是输入结点: