正在加载图片...
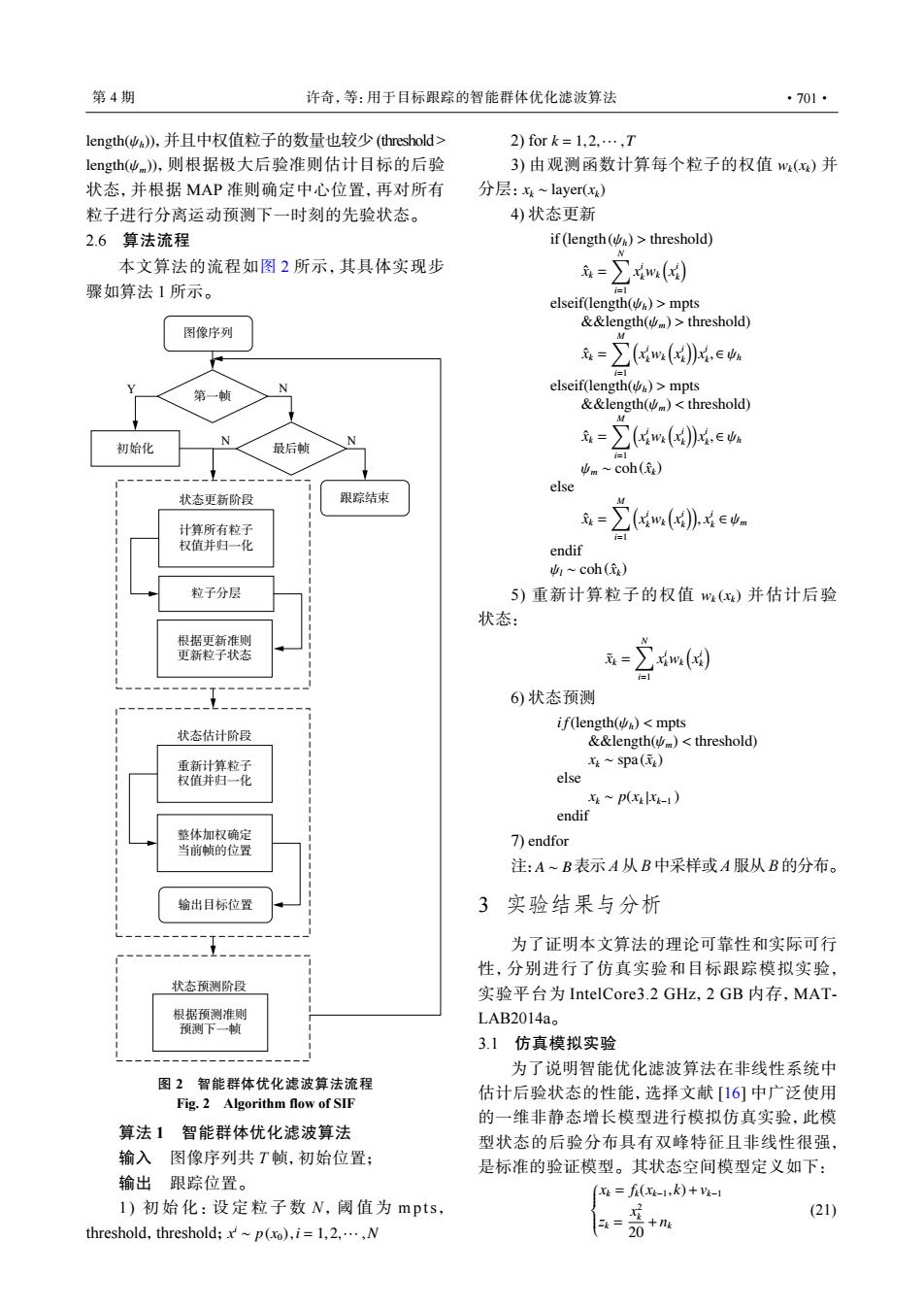
第4期 许奇,等:用于目标跟踪的智能群体优化滤波算法 ·701· length(wa),并且中权值粒子的数量也较少(threshold> 2)fork=1,2,…,T length(也m),则根据极大后验准则估计目标的后验 3)由观测函数计算每个粒子的权值w()并 状态,并根据MAP准则确定中心位置,再对所有 分层:x4~layer(x) 粒子进行分离运动预测下一时刻的先验状态。 4)状态更新 2.6算法流程 if (length()>threshold) 本文算法的流程如图2所示,其具体实现步 a=∑) 骤如算法1所示。 elseif(length()>mpts 图像序列 &&length()>threshold) 立=∑((n(》.e 第一帧 elseif(length()>mpts &&length()<threshold) 初始化 最后帧 a=∑m(),e 山m~coh(元) else 状态更新阶段 跟踪结束 计算所有粒子 a=∑(w(》e中 权值并归一化 endif ~coh() 粒子分层 5)重新计算粒子的权值w(x)并估计后验 状态: 根据更新准则 更新粒子状态 6)状态预测 if(length()<mpts 状态估计阶段 &&length()threshold) 重新计算粒子 x~spa() 权值并归一化 else x4~p(xx-1) endif 整体加权确定 7)endfor 当前帧的位置 注:A~B表示A从B中采样或A服从B的分布。 输出目标位置 3实验结果与分析 为了证明本文算法的理论可靠性和实际可行 性,分别进行了仿真实验和目标跟踪模拟实验, 状态预测阶段 实验平台为IntelCore3.2GHz,2GB内存,MAT- 根据预测准则 LAB2014a。 预测下一帧 3.1仿真模拟实验 为了说明智能优化滤波算法在非线性系统中 图2智能群体优化滤波算法流程 估计后验状态的性能,选择文献[16]中广泛使用 Fig.2 Algorithm flow of SIF 的一维非静态增长模型进行模拟仿真实验,此模 算法1智能群体优化滤波算法 型状态的后验分布具有双峰特征且非线性很强, 输入图像序列共T帧,初始位置: 是标准的验证模型。其状态空间模型定义如下: 输出跟踪位置。 (=f(-1,k)+V- 1)初始化:设定粒子数N,阈值为mpts, (21) threshold,threshold;~p(xo),i=1,2,....N 20+nlength(ψh)) length(ψm)) ,并且中权值粒子的数量也较少 (threshold > ,则根据极大后验准则估计目标的后验 状态,并根据 MAP 准则确定中心位置,再对所有 粒子进行分离运动预测下一时刻的先验状态。 2.6 算法流程 本文算法的流程如图 2 所示,其具体实现步 骤如算法 1 所示。 N N Y N 第一帧 初始化 最后帧 粒子分层 根据更新准则 更新粒子状态 计算所有粒子 权值并归一化 状态估计阶段 重新计算粒子 权值并归一化 整体加权确定 当前帧的位置 图像序列 跟踪结束 状态预测阶段 根据预测准则 预测下一帧 输出目标位置 状态更新阶段 图 2 智能群体优化滤波算法流程 Fig. 2 Algorithm flow of SIF 算法 1 智能群体优化滤波算法 输入 图像序列共 T 帧,初始位置; 输出 跟踪位置。 x i ∼ p(x0),i = 1,2,··· ,N 1) 初始化:设定粒子 数 N,阈值 为 mpts, threshold,threshold; 2) for k = 1,2,··· ,T wk(xk) xk ∼ layer(xk) 3) 由观测函数计算每个粒子的权值 并 分层: 4) 状态更新 if( length(ψh) > threshold) xˆk = ∑N i=1 x i kwk ( x i k ) elseif(length(ψh) > mpts &&length(ψm) > threshold) xˆk = ∑M i=1 ( x i kwk ( x i k ))x i k ,∈ ψh elseif(length(ψh) > mpts &&length(ψm) < threshold) xˆk = ∑M i=1 ( x i kwk ( x i k ))x i k ,∈ ψh ψm ∼ coh(xˆk) else xˆk = ∑M i=1 ( x i kwk ( x i k )), x i k ∈ ψm endif ψl ∼ coh(xˆk) 5) 重新计算粒子的权值 wk (xk) 并估计后验 状态: x˜k = ∑N i=1 x i kwk ( x i k ) 6) 状态预测 i f(length(ψh) < mpts &&length(ψm) < threshold) xk ∼ spa (x˜k) else xk ∼ p(xk |xk−1 ) endif 7) endfor 注: A ∼ B 表示 A 从 B 中采样或 A 服从 B 的分布。 3 实验结果与分析 为了证明本文算法的理论可靠性和实际可行 性,分别进行了仿真实验和目标跟踪模拟实验, 实验平台为 IntelCore3.2 GHz,2 GB 内存,MATLAB2014a。 3.1 仿真模拟实验 为了说明智能优化滤波算法在非线性系统中 估计后验状态的性能,选择文献 [16] 中广泛使用 的一维非静态增长模型进行模拟仿真实验,此模 型状态的后验分布具有双峰特征且非线性很强, 是标准的验证模型。其状态空间模型定义如下: xk = fk(xk−1, k)+vk−1 zk = x 2 k 20 +nk (21) 第 4 期 许奇,等:用于目标跟踪的智能群体优化滤波算法 ·701·