正在加载图片...
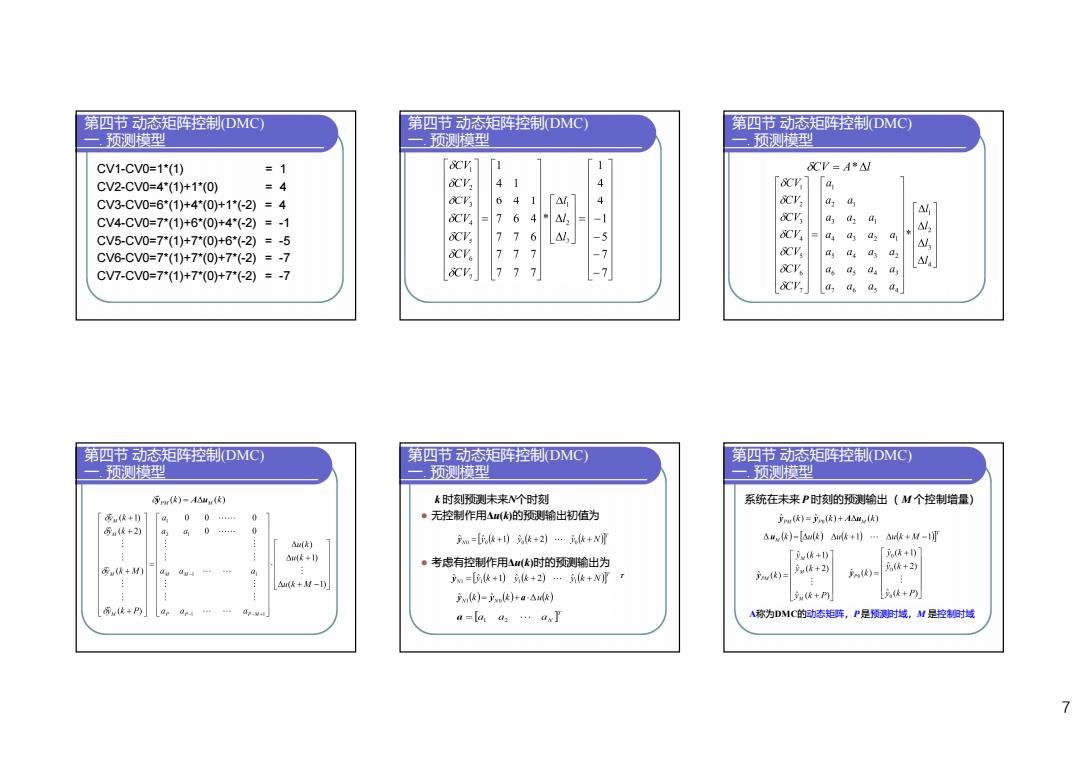
第四节动态矩阵控制DMC 第四节动态矩阵控制DMC 第四节动态矩阵控制DMC) 一预测模型 一预测模型 一预测测模型 CV1-CV0=1*(1) =1 1 CV=A*△W CV2-CV0=4(1)+1*(0) =4 1 4 8CV a CV3-CV0=6*(1)+4*(0)+1*(-2)=4 6 4 4 8CV; 4 a41 CV4-CV0=7*(1)+6*(0+4*(-2)=-1 1 6 4 -1 CV CV5-CV0=7*(1)+7*(0)+6*(-2)=-5 7 6 5 a CV6-CV0=7*(1)+7*(0+7*(-2)=-7 7 7 7 CV7-CV0=7产(1)+7*(0+7*(-2)=-7 8CV 7 -7 a a 第四节动态矩阵控制DMC 第四节动态矩阵控制DMC】 第四节动态矩阵控制(DMC 一预测模型 一预测测模型 一预测测模型 示r)=Au) k时刻预测未来N个时刻 系统在未来P时刻的预测翰出(M个控制增量) (k+) a 00 07 ·无控制作用Ak)的预测输出初值为 jru()=j )+AAmy ( ,(k+2) 40 0 Au(k) m=+)+2)…低+明 △w)-△w)△n+i)…Ak+M-l △nG+D 「(话+1) 「j话+) 。考虑有控制作用△(k)时的预测输出为 乎=[++2)…+N明1 w)=,话+2 k+2) w)= △(k+M-D jv()-jvo()+a-aidg) u低+ (P) w传+P -w a=【aa…awJ A称为DMC的动态矩车,P是预剥时域,M是控制归时域 77 第四节 动态矩阵控制(DMC) 一. 预测模型 CV1-CV0=1*(1) = 1 CV2-CV0=4*(1)+1*(0) = 4 CV3-CV0=6*(1)+4*(0)+1*(-2) = 4 CV4-CV0=7*(1)+6*(0)+4*(-2) = -1 CV5-CV0=7*(1)+7*(0)+6*(-2) = -5 CV6-CV0=7*(1)+7*(0)+7*(-2) = -7 CV7-CV0=7*(1)+7*(0)+7*(-2) = -7 第四节 动态矩阵控制(DMC) 一. 预测模型 第四节 动态矩阵控制(DMC) 一. 预测模型 第四节 动态矩阵控制(DMC) 一. 预测模型 第四节 动态矩阵控制(DMC) 一. 预测模型 k 时刻预测未来N个时刻 无控制作用Δu(k)的预测输出初值为 0 y ˆ ˆ N0 0 0 考虑有控制作用Δu(k)时的预测输出为 ˆ y k 1 y k 2 T y ˆ ˆ N1 1 1 y k y k a Δu k ˆ ˆ N1 N0 T 第四节 动态矩阵控制(DMC) 一. 预测模型 系统在未来 P 时刻的预测输出( M 个控制增量) ˆ ˆ y (k) y (k) A u (k) PM P0 M ΔuM k u k u k 1 yˆ (k 1) 0 M y yˆ (k 2) ˆ (k 2) 0 y yˆ (k) ˆ (k) M P0 PM A称为DMC的动态矩阵,P是预测时域,M 是控制时域