正在加载图片...
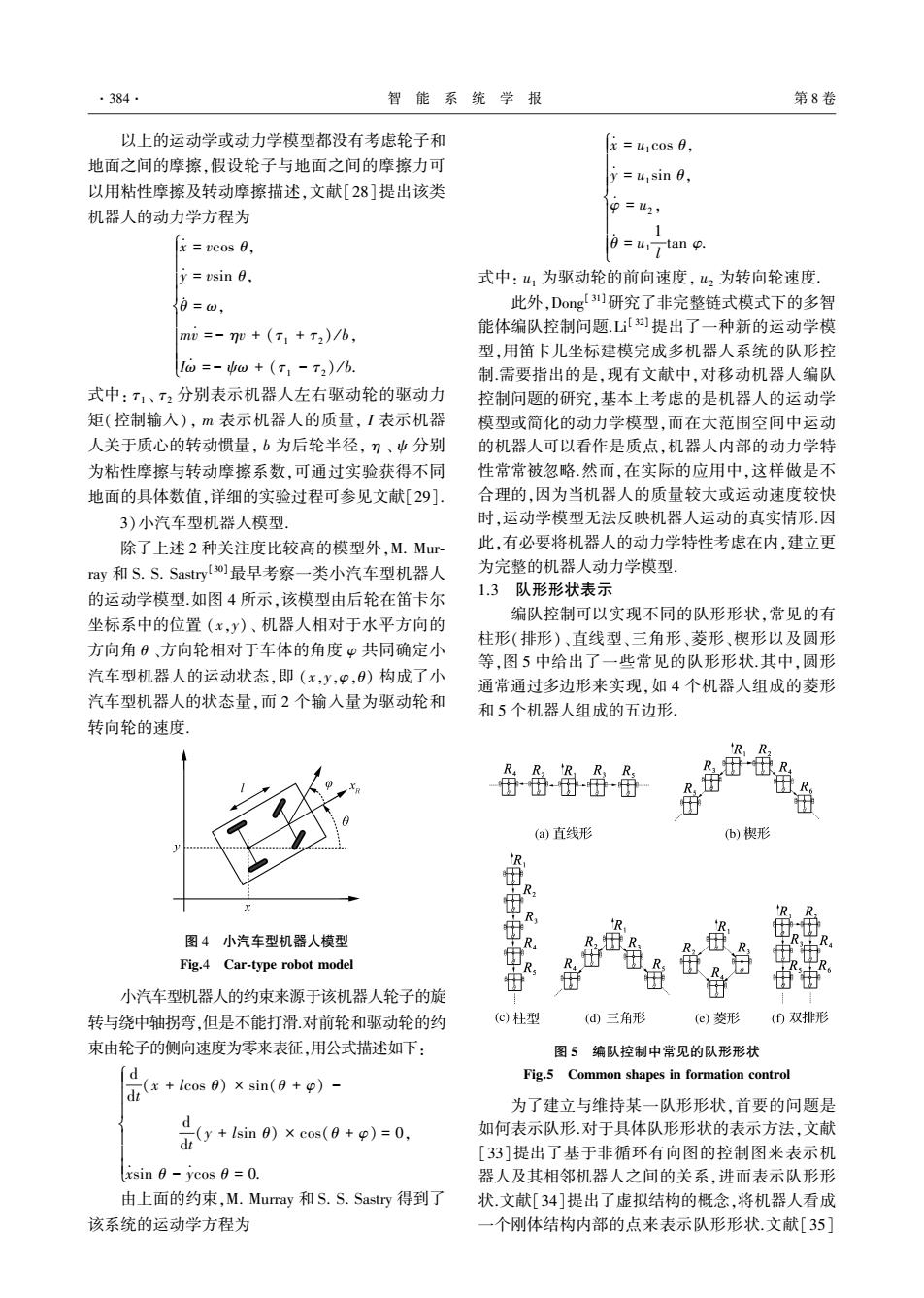
·384· 智能系统学报 第8卷 以上的运动学或动力学模型都没有考虑轮子和 =ucos 0, 地面之间的摩擦,假设轮子与地面之间的摩擦力可 y =u sin 0, 以用粘性摩擦及转动摩擦描述,文献[28]提出该类 机器人的动力学方程为 u2, 1 [cos 0, 0=utan y usin 0. 式中:41为驱动轮的前向速度,2为转向轮速度, 0=w, 此外,Dong[3)研究了非完整链式模式下的多智 mw=-7e+(T1+T2)/b, 能体编队控制问题刘)提出了一种新的运动学模 型,用笛卡儿坐标建模完成多机器人系统的队形控 lo=-ω+(T1-T2)/b. 制需要指出的是,现有文献中,对移动机器人编队 式中:T1、T2分别表示机器人左右驱动轮的驱动力 控制问题的研究,基本上考虑的是机器人的运动学 矩(控制输入),m表示机器人的质量,I表示机器 模型或简化的动力学模型,而在大范围空间中运动 人关于质心的转动惯量,b为后轮半径,刀、中分别 的机器人可以看作是质点,机器人内部的动力学特 为粘性摩擦与转动摩擦系数,可通过实验获得不同 性常常被忽略.然而,在实际的应用中,这样做是不 地面的具体数值,详细的实验过程可参见文献[29]. 合理的,因为当机器人的质量较大或运动速度较快 3)小汽车型机器人模型 时,运动学模型无法反映机器人运动的真实情形.因 除了上述2种关注度比较高的模型外,M.Mur- 此,有必要将机器人的动力学特性考虑在内,建立更 ray和S.S.Sastry[1最早考察一类小汽车型机器人 为完整的机器人动力学模型。 的运动学模型.如图4所示,该模型由后轮在笛卡尔 1.3队形形状表示 坐标系中的位置(x,y)、机器人相对于水平方向的 编队控制可以实现不同的队形形状,常见的有 柱形(排形)、直线型、三角形、菱形、楔形以及圆形 方向角0、方向轮相对于车体的角度”共同确定小 等,图5中给出了一些常见的队形形状.其中,圆形 汽车型机器人的运动状态,即(x,y,P,)构成了小 通常通过多边形来实现,如4个机器人组成的菱形 汽车型机器人的状态量,而2个输入量为驱动轮和 和5个机器人组成的五边形 转向轮的速度. RR R田团 团R, (a)直线形 b)楔形 图4小汽车型机器人模型 R R 团R, 由 Fig.4 Car-type robot model 守 小汽车型机器人的约束来源于该机器人轮子的旋 河 转与绕中轴拐弯,但是不能打滑.对前轮和驱动轮的约 (c)柱型 (d)三角形 (e)菱形 ()双排形 束由轮子的侧向速度为零来表征,用公式描述如下: 图5编队控制中常见的队形形状 d dt x+lcos9)×sin(0+p)- Fig.5 Common shapes in formation control 为了建立与维持某一队形形状,首要的问题是 y+lsin0))×cos(0+p)=0, d 如何表示队形.对于具体队形形状的表示方法,文献 [33]提出了基于非循环有向图的控制图来表示机 xsin 0-ycos 0 =0. 器人及其相邻机器人之间的关系,进而表示队形形 由上面的约束,M.Murray和S.S.Sastry得到了 状文献[34]提出了虚拟结构的概念,将机器人看成 该系统的运动学方程为 一个刚体结构内部的点来表示队形形状.文献[35]以上的运动学或动力学模型都没有考虑轮子和 地面之间的摩擦,假设轮子与地面之间的摩擦力可 以用粘性摩擦及转动摩擦描述,文献[28]提出该类 机器人的动力学方程为 x · = vcos θ, y · = vsin θ, θ · = ω, mv · = - ηv + (τ1 + τ2 ) / b, Iω · = - ψω + (τ1 - τ2 ) / b. ì î í ï ï ï ï ï ï ï ï 式中: τ1 、 τ2 分别表示机器人左右驱动轮的驱动力 矩(控制输入), m 表示机器人的质量, I 表示机器 人关于质心的转动惯量, b 为后轮半径, η 、 ψ 分别 为粘性摩擦与转动摩擦系数,可通过实验获得不同 地面的具体数值,详细的实验过程可参见文献[29]. 3)小汽车型机器人模型. 除了上述 2 种关注度比较高的模型外,M. Mur⁃ ray 和 S. S. Sastry [30]最早考察一类小汽车型机器人 的运动学模型.如图 4 所示,该模型由后轮在笛卡尔 坐标系中的位置 (x,y)、 机器人相对于水平方向的 方向角 θ 、方向轮相对于车体的角度 φ 共同确定小 汽车型机器人的运动状态,即 (x,y,φ,θ) 构成了小 汽车型机器人的状态量,而 2 个输入量为驱动轮和 转向轮的速度. 图 4 小汽车型机器人模型 Fig.4 Car⁃type robot model 小汽车型机器人的约束来源于该机器人轮子的旋 转与绕中轴拐弯,但是不能打滑.对前轮和驱动轮的约 束由轮子的侧向速度为零来表征,用公式描述如下: d dt (x + lcos θ) × sin(θ + φ) - d dt (y + lsin θ) × cos(θ + φ) = 0, x · sin θ - y · cos θ = 0. ì î í ï ï ï ï ï ï 由上面的约束,M. Murray 和 S. S. Sastry 得到了 该系统的运动学方程为 x · = u1 cos θ, y · = u1 sin θ, φ · = u2 , θ · = u1 1 l tan φ. ì î í ï ï ï ï ï ï ïï 式中: u1 为驱动轮的前向速度, u2 为转向轮速度. 此外,Dong [ 31]研究了非完整链式模式下的多智 能体编队控制问题.Li [ 32] 提出了一种新的运动学模 型,用笛卡儿坐标建模完成多机器人系统的队形控 制.需要指出的是,现有文献中,对移动机器人编队 控制问题的研究,基本上考虑的是机器人的运动学 模型或简化的动力学模型,而在大范围空间中运动 的机器人可以看作是质点,机器人内部的动力学特 性常常被忽略.然而,在实际的应用中,这样做是不 合理的,因为当机器人的质量较大或运动速度较快 时,运动学模型无法反映机器人运动的真实情形.因 此,有必要将机器人的动力学特性考虑在内,建立更 为完整的机器人动力学模型. 1.3 队形形状表示 编队控制可以实现不同的队形形状,常见的有 柱形(排形)、直线型、三角形、菱形、楔形以及圆形 等,图 5 中给出了一些常见的队形形状.其中,圆形 通常通过多边形来实现,如 4 个机器人组成的菱形 和 5 个机器人组成的五边形. 图 5 编队控制中常见的队形形状 Fig.5 Common shapes in formation control 为了建立与维持某一队形形状,首要的问题是 如何表示队形.对于具体队形形状的表示方法,文献 [33]提出了基于非循环有向图的控制图来表示机 器人及其相邻机器人之间的关系,进而表示队形形 状.文献[34]提出了虚拟结构的概念,将机器人看成 一个刚体结构内部的点来表示队形形状.文献[35] ·384· 智 能 系 统 学 报 第 8 卷