正在加载图片...
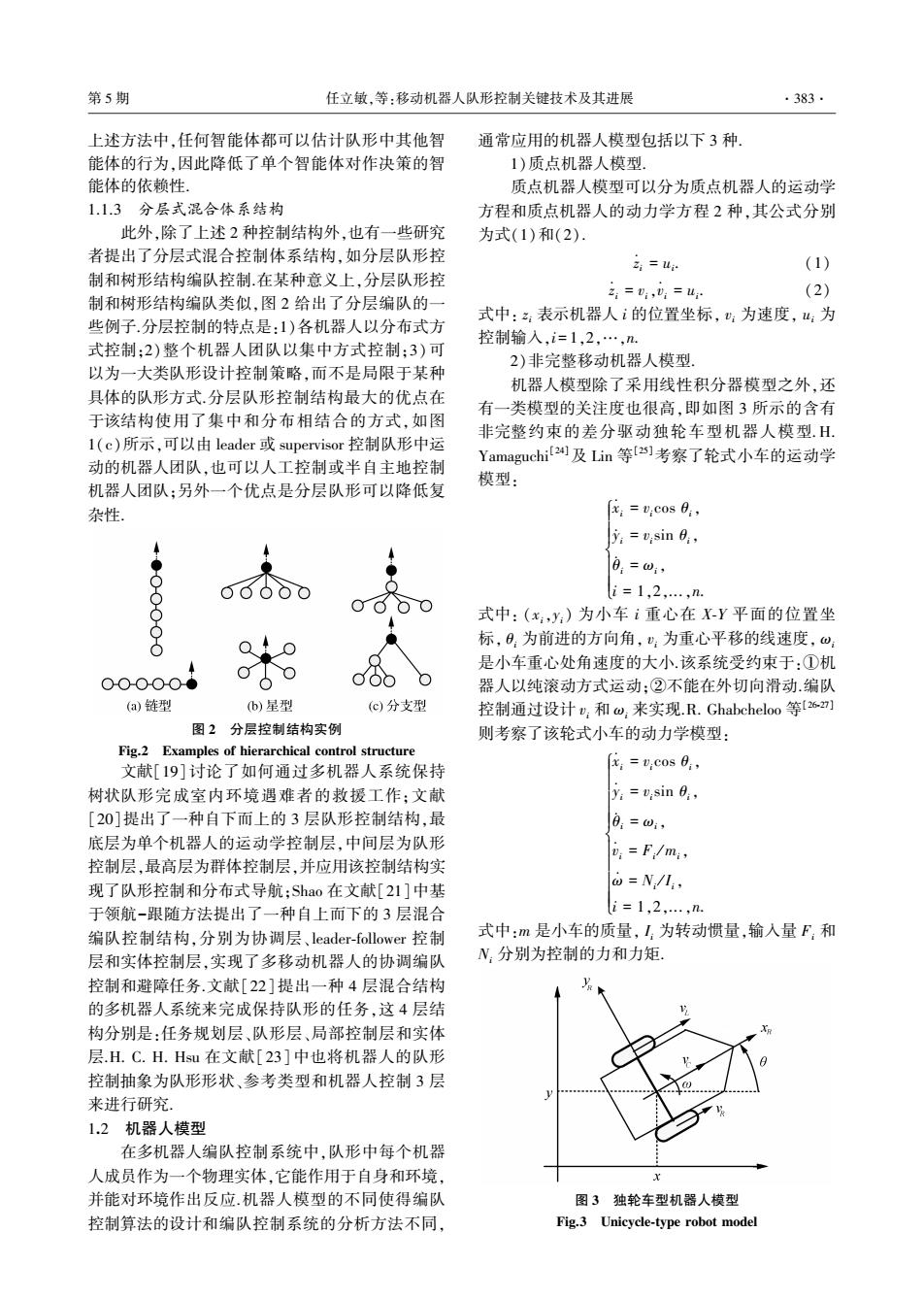
第5期 任立敏,等:移动机器人队形控制关键技术及其进展 .383. 上述方法中,任何智能体都可以估计队形中其他智 通常应用的机器人模型包括以下3种 能体的行为,因此降低了单个智能体对作决策的智 1)质点机器人模型. 能体的依赖性。 质点机器人模型可以分为质点机器人的运动学 1.1.3分层式混合体系结构 方程和质点机器人的动力学方程2种,其公式分别 此外,除了上述2种控制结构外,也有一些研究 为式(1)和(2) 者提出了分层式混合控制体系结构,如分层队形控 2=um (1) 制和树形结构编队控制在某种意义上,分层队形控 (2) 制和树形结构编队类似,图2给出了分层编队的一 2=0:,:=u 式中::表示机器人i的位置坐标,:为速度,u:为 些例子分层控制的特点是:1)各机器人以分布式方 控制输入,i=1,2,…,n 式控制:2)整个机器人团队以集中方式控制:3)可 2)非完整移动机器人模型. 以为一大类队形设计控制策略,而不是局限于某种 机器人模型除了采用线性积分器模型之外,还 具体的队形方式分层队形控制结构最大的优点在 有一类模型的关注度也很高,即如图3所示的含有 于该结构使用了集中和分布相结合的方式,如图 非完整约束的差分驱动独轮车型机器人模型.H. 1(c)所示,可以由leader或supervisor控制队形中运 动的机器人团队,也可以人工控制或半自主地控制 Yamaguchi2及Lin等[2]考察了轮式小车的运动学 机器人团队:另外一个优点是分层队形可以降低复 模型: 杂性。 元:=,c0s9:, ly;vsin 0, 0=w:, i=1,2,,n. 式中:(x:,y:)为小车i重心在X-Y平面的位置坐 Q 标,日:为前进的方向角,心:为重心平移的线速度,ω 是小车重心处角速度的大小.该系统受约束于:①机 O0-00-0-4 器人以纯滚动方式运动:②不能在外切向滑动编队 (a)链型 b)星型 (c)分支型 控制通过设计,和w,来实现.R.Ghabcheloo等[2 图2分层控制结构实例 则考察了该轮式小车的动力学模型: Fig.2 Examples of hierarchical control structure 文献[19]讨论了如何通过多机器人系统保持 =:C0s8:, 树状队形完成室内环境遇难者的救援工作:文献 y:v;sin 0, [20]提出了一种自下而上的3层队形控制结构,最 0=w:, 底层为单个机器人的运动学控制层,中间层为队形 :=F/m, 控制层,最高层为群体控制层,并应用该控制结构实 现了队形控制和分布式导航:Shao在文献[21]中基 @N:/I:, 于领航-跟随方法提出了一种自上而下的3层混合 i=1,2,.,n. 编队控制结构,分别为协调层、leader-follower控制 式中:m是小车的质量,I,为转动惯量,输入量F,和 层和实体控制层,实现了多移动机器人的协调编队 N,分别为控制的力和力矩, 控制和避障任务.文献[22]提出一种4层混合结构 的多机器人系统来完成保持队形的任务,这4层结 构分别是:任务规划层、队形层、局部控制层和实体 层.H.C.H.Hsu在文献[23]中也将机器人的队形 控制抽象为队形形状、参考类型和机器人控制3层 来进行研究」 1.2机器人模型 在多机器人编队控制系统中,队形中每个机器 人成员作为一个物理实体,它能作用于自身和环境, 并能对环境作出反应.机器人模型的不同使得编队 图3独轮车型机器人模型 控制算法的设计和编队控制系统的分析方法不同, Fig.3 Unicycle-type robot model上述方法中,任何智能体都可以估计队形中其他智 能体的行为,因此降低了单个智能体对作决策的智 能体的依赖性. 1.1.3 分层式混合体系结构 此外,除了上述 2 种控制结构外,也有一些研究 者提出了分层式混合控制体系结构,如分层队形控 制和树形结构编队控制.在某种意义上,分层队形控 制和树形结构编队类似,图 2 给出了分层编队的一 些例子.分层控制的特点是:1)各机器人以分布式方 式控制;2)整个机器人团队以集中方式控制;3) 可 以为一大类队形设计控制策略,而不是局限于某种 具体的队形方式.分层队形控制结构最大的优点在 于该结构使用了集中和分布相结合的方式,如图 1(c)所示,可以由 leader 或 supervisor 控制队形中运 动的机器人团队,也可以人工控制或半自主地控制 机器人团队;另外一个优点是分层队形可以降低复 杂性. 图 2 分层控制结构实例 Fig.2 Examples of hierarchical control structure 文献[19]讨论了如何通过多机器人系统保持 树状队形完成室内环境遇难者的救援工作;文献 [20]提出了一种自下而上的 3 层队形控制结构,最 底层为单个机器人的运动学控制层,中间层为队形 控制层,最高层为群体控制层,并应用该控制结构实 现了队形控制和分布式导航;Shao 在文献[21]中基 于领航-跟随方法提出了一种自上而下的 3 层混合 编队控制结构,分别为协调层、leader⁃follower 控制 层和实体控制层,实现了多移动机器人的协调编队 控制和避障任务.文献[22]提出一种 4 层混合结构 的多机器人系统来完成保持队形的任务,这 4 层结 构分别是:任务规划层、队形层、局部控制层和实体 层.H. C. H. Hsu 在文献[23]中也将机器人的队形 控制抽象为队形形状、参考类型和机器人控制 3 层 来进行研究. 1.2 机器人模型 在多机器人编队控制系统中,队形中每个机器 人成员作为一个物理实体,它能作用于自身和环境, 并能对环境作出反应.机器人模型的不同使得编队 控制算法的设计和编队控制系统的分析方法不同, 通常应用的机器人模型包括以下 3 种. 1)质点机器人模型. 质点机器人模型可以分为质点机器人的运动学 方程和质点机器人的动力学方程 2 种,其公式分别 为式(1)和(2). z · i = ui . (1) z · i = vi,v · i = ui . (2) 式中: zi 表示机器人 i 的位置坐标, vi 为速度, ui 为 控制输入,i = 1,2,…,n. 2)非完整移动机器人模型. 机器人模型除了采用线性积分器模型之外,还 有一类模型的关注度也很高,即如图 3 所示的含有 非完整约束的差分驱动独轮车型机器人模型. H. Yamaguchi [24]及 Lin 等[25]考察了轮式小车的运动学 模型: x · i = vi cos θi, y · i = vi sin θi, θ · i = ωi, i = 1,2,...,n. ì î í ï ï ï ï ïï 式中: (xi,yi) 为小车 i 重心在 X⁃Y 平面的位置坐 标, θi 为前进的方向角, vi 为重心平移的线速度, ωi 是小车重心处角速度的大小.该系统受约束于:①机 器人以纯滚动方式运动;②不能在外切向滑动.编队 控制通过设计 vi 和 ωi 来实现.R. Ghabcheloo 等[26⁃27] 则考察了该轮式小车的动力学模型: x · i = vi cos θi, y · i = vi sin θi, θ · i = ωi, v · i = Fi / mi, ω · = Ni / Ii, i = 1,2,...,n. ì î í ï ï ï ï ï ï ï ï ïï 式中:m 是小车的质量, Ii 为转动惯量,输入量 Fi 和 Ni 分别为控制的力和力矩. 图 3 独轮车型机器人模型 Fig.3 Unicycle⁃type robot model 第 5 期 任立敏,等:移动机器人队形控制关键技术及其进展 ·383·