正在加载图片...
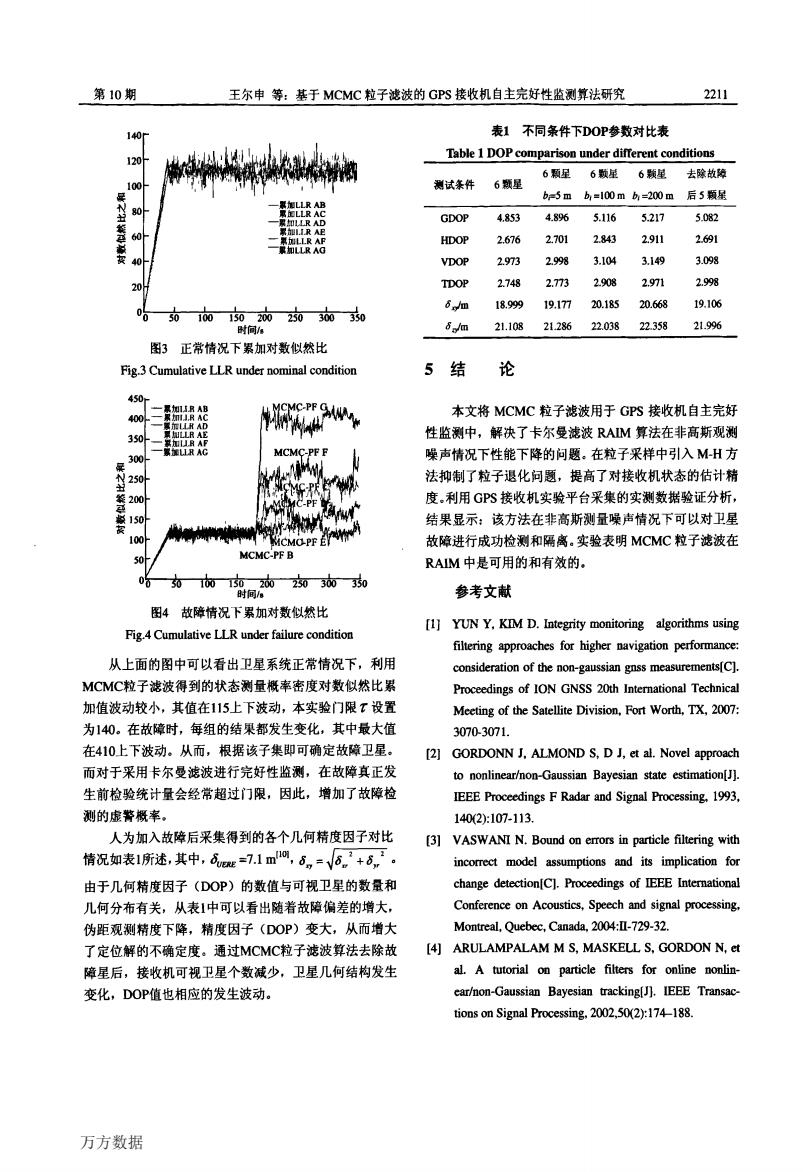
第10期 王尔申等:基于MCMC粒子滤波的GPS接收机自主完好性监测算法研究 2211 140r 表1不同条件下DOP参数对比表 Table 1 DOP comparison under different conditions 120 6颗星6颗座6颗星 去除故障 100 测试条件 6颗星 b=5mb,=100mb=200m后5颗星 80 LLR AB GDOP 4.853 4.89% 5.116 5.217 5.082 60 ILLR AF HDOP 2.676 2.701 2.843 2.911 2691 素加LLR AG VDOP 2.973 2.998 3.104 3.149 3.098 20 TDOP 2.748 2.773 2.908 2.971 2.998 6加 18.999 19.177 20.185 20.668 19.106 0% 3010050200230300330 时间 8 /m 21.108 21286 22.038 22.358 21.996 图3正常情况下累加对数似然比 Fig.3 Cumulative LLR under nominal condition 5结 论 450 本文将MCMC粒子滤波用于GPS接收机自主完好 LR AD 性监测中,解决了卡尔曼滤波RAIM算法在非高斯观测 3 MCMC-PF F 噪声情况下性能下降的问题。在粒子采样中引入M-H方 250 法抑制了粒子退化问题,提高了对接收机状态的估计精 200 度.利用GPS接收机实验平台采集的实测数据验证分析, 150 结果显示:该方法在非高斯测量噪声情况下可以对卫星 100 MCMO-PF E 故障进行成功检测和隔离.实验表明MCMC粒子滤波在 MCMC-PF B RAIM中是可用的和有效的, 06一0101布2230300350 时间 参考文献 图4故障情况下累加对数似然比 [1]YUN Y.KIM D.Integrity monitoring algorithms using Fig.4 Cumulative LLR under failure condition filtering approaches for higher navigation performance: 从上面的图中可以看出卫星系统正常情况下,利用 consideration of the non-gaussian gnss measurements[C]. MCMC粒子滤波得到的状态测量概率密度对数似然比累 Proceedings of ION GNSS 20th International Technical 加值波动较小,其值在115上下波动,本实验门限T设置 Meeting of the Satellite Division,Fort Worth,TX,2007: 为140。在故障时,每组的结果都发生变化,其中最大值 3070-3071. 在410上下波动。从而,根据该子集即可确定故障卫星。 [2]GORDONN J,ALMOND S,D J,et al.Novel approach 而对于采用卡尔曼滤波进行完好性监测,在故障真正发 to nonlinear/non-Gaussian Bayesian state estimation[J]. 生前检验统计量会经常超过门限,因此,增加了故障检 IEEE Proceedings F Radar and Signal Processing,1993. 测的虚警概率。 140(2):107-113 人为加入故障后采集得到的各个几何精度因子对比 [3]VASWANI N.Bound on errors in particle filtering with 情况如表1所述,其中,dee=7.1m0,6,=V6。+6,。 incorrect model assumptions and its implication for 由于几何精度因子(DOP)的数值与可视卫星的数量和 change detection[Cl.Proceedings of IEEE International 几何分布有关,从表1中可以看出随着故障偏差的增大, Conference on Acoustics,Speech and signal processing. 伪距观测精度下降,精度因子(DOP)变大,从而增大 Montreal,Quebec,Canada,2004:II-729-32. 了定位解的不确定度。通过MCMC粒子滤波算法去除故 [4]ARULAMPALAM M S,MASKELL S,GORDON N.et 障星后,接收机可视卫星个数减少,卫星几何结构发生 al.A tutorial on particle filters for online nonlin- 变化,DOP值也相应的发生波动。 ear/non-Gaussian Bayesian tracking[J).IEEE Transac- tions on Signal Processing,2002,50(2):174-188 万方数据第10期 王尔申等:基于MCMC粒子滤波的GPS接收机自主完好性监测算法研究 221l 140 120 100 霹 型80 耄60 豢 靛柏 20 0 时问/s 图3正常情况下累加对数似然比 Fig.3 Cumulative LLRunder nominal condition 犀 N 篁 蕊 牵 豢 智 时间Is 图4故障情况下累加对数似然比 Fig.4 Cumulative LLR under failure condition 从上面的图中可以看出卫星系统正常情况下,利用 MCMC粒子滤波得到的状态测量概率密度对数似然比累 加值波动较小,其值在115上下波动,本实验门限彳设置 为140。在故障时,每组的结果都发生变化,其中最大值 在410上下波动。从而,根据该子集即可确定故障卫星。 而对于采用卡尔曼滤波进行完好性监测,在故障真正发 生前检验统计量会经常超过门限,因此,增加了故障检 测的虚警概率。 人为加入故障后采集得到的各个几何精度因子对比 情况如表l所述,其中,毛吣=7.1 mn饥,厶=√丸2+万,,2。 由于几何精度因子(DoP)的数值与可视卫星的数量和 几何分布有关,从表l中可以看出随着故障偏差的增大, 伪距观测精度下降,精度因子(DOP)变大,从而增大 了定位解的不确定度。通过MCMC粒子滤波算法去除故 障星后,接收机可视卫星个数减少,卫星几何结构发生 变化,DOP值也相应的发生波动。 表1不同条件下DOP参数对比表 Table 1 DOPcomparison under different conditions 5结 论 本文将MCMC粒子滤波用于GPS接收机自主完好 性监测中,解决了卡尔曼滤波RAIM算法在非高斯观测 噪声情况下性能下降的问题。在粒子采样中引入M.H方 法抑制了粒子退化问题,提高了对接收机状态的估计精 度。利用GPS接收机实验平台采集的实测数据验证分析, 结果显示:该方法在非高斯测量噪声情况下可以对卫星 故障进行成功检测和隔离。实验表明MCMC粒子滤波在 RAIM中是可用的和有效的。 参考文献 f1】YUN Y’KIM D.Integrity monitoring algorithms using filtering approaches for higher navigation performance: consideration of the non-ganssian gnss measurements[C]. Proceedings of 10N GNSS 20th International Technical Meeting of the Satellite Division,Fort Worth,TX,2007: 30.70.307 1. 【2】GORI)oNN J'ALMOND S,D J,et a1.Novel approach to nonlinear/non—Gaussian Bayesian state estimation[J]. IEEE Proceedings F Radar and Signal Processing,1993, 140(2):107-113. 【3】VASWANI N.Bound On elTors in particle filtcdng with incorrect model assumptions and its implication for change detection[C].Proceedings of IEEE International Conference on Acoustics,Speech and signal processing, Montreal,Quebec,Canada,2004:1I-729—32. 【4】ARULAMPALAM M S,MASKELL S,GORDON N,et a1.A tutorial On particle filters for online nonlincar/non—Gaussian Bayesian tracking[J].IEEE Transactions on Signal Processing,2002.50(2):174-188. 万方数据