正在加载图片...
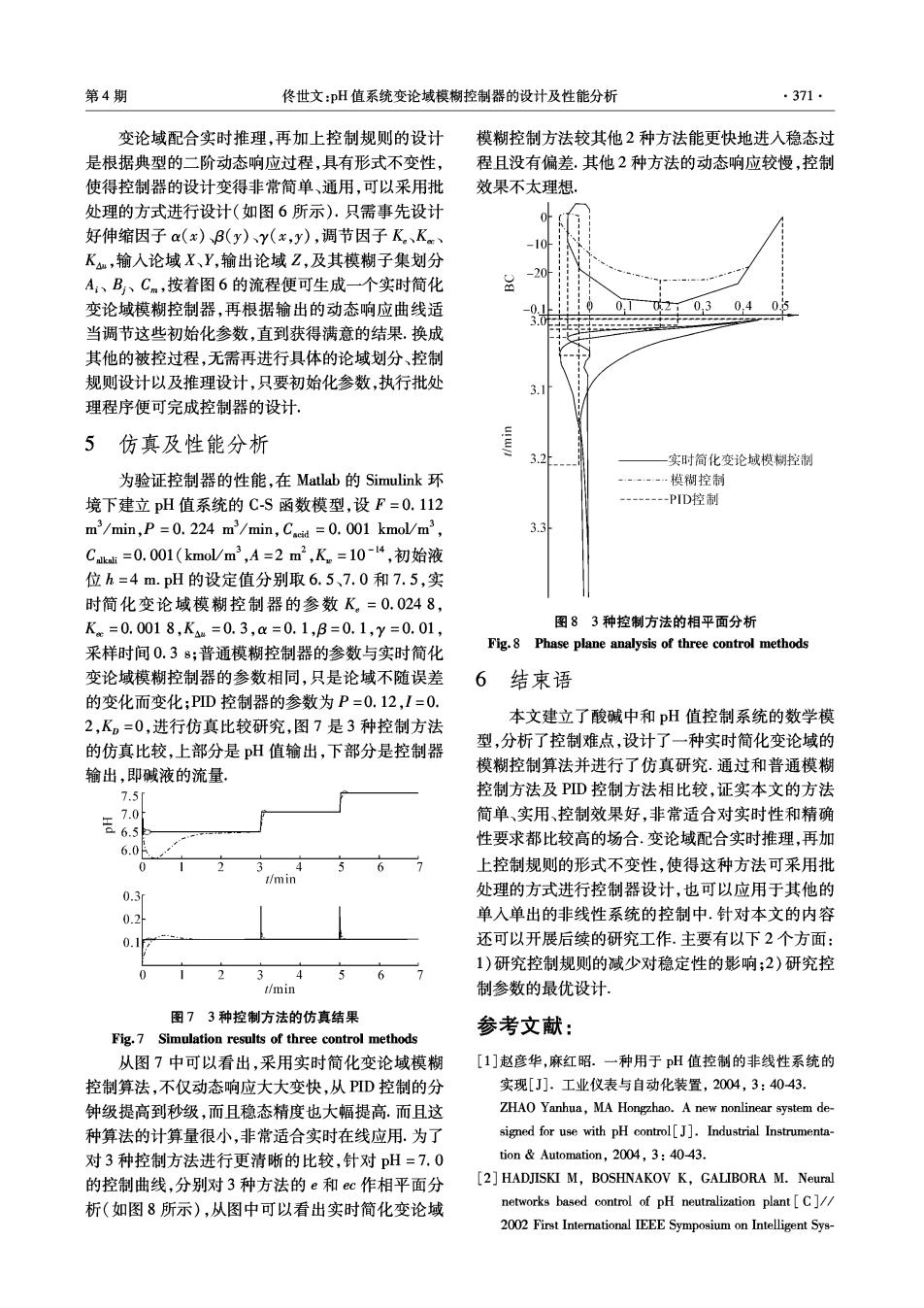
第4期 佟世文:pH值系统变论域模糊控制器的设计及性能分析 ·371· 变论域配合实时推理,再加上控制规则的设计 模糊控制方法较其他2种方法能更快地进入稳态过 是根据典型的二阶动态响应过程,具有形式不变性, 程且没有偏差.其他2种方法的动态响应较慢,控制 使得控制器的设计变得非常简单、通用,可以采用批 效果不太理想, 处理的方式进行设计(如图6所示).只需事先设计 好伸缩因子a(x)B(y)、y(x,y),调节因子K。、K K,输人论域X、Y,输出论域Z,及其模糊子集划分 A:、B、Cm,按着图6的流程便可生成一个实时简化 变论域模糊控制器,再根据输出的动态响应曲线适 04 当调节这些初始化参数,直到获得满意的结果.换成 其他的被控过程,无需再进行具体的论域划分、控制 规则设计以及推理设计,只要初始化参数,执行批处 3.1 理程序便可完成控制器的设计. 5仿真及性能分析 实时简化变论域模糊控制 为验证控制器的性能,在Matlab的Simulink环 -----…模糊控制 境下建立pH值系统的C-S函数模型,设F=0.112 --PID控制 m/min,P =0.224 m/min,C.id =0.001 kmol/m3, Ca=0.001(kmo/m3,A=2m2,K=10-4,初始液 位h=4m.pH的设定值分别取6.5、7.0和7.5,实 时简化变论域模糊控制器的参数K。=0.0248, K=0.0018,Ka=0.3,a=0.1,B=0.1,Y=0.01, 图83种控制方法的相平面分析 采样时间0.38;普通模糊控制器的参数与实时简化 Fig.8 Phase plane analysis of three control methods 变论域模糊控制器的参数相同,只是论域不随误差 6 结束语 的变化而变化;PD控制器的参数为P=0.12,1=0. 2,K,=0,进行仿真比较研究,图7是3种控制方法 本文建立了酸碱中和pH值控制系统的数学模 型,分析了控制难点,设计了一种实时简化变论域的 的仿真比较,上部分是pH值输出,下部分是控制器 输出,即碱液的流量。 模糊控制算法并进行了仿真研究.通过和普通模糊 7.5 控制方法及PD控制方法相比较,证实本文的方法 7.0 6.5 简单、实用、控制效果好,非常适合对实时性和精确 性要求都比较高的场合.变论域配合实时推理,再加 6.0 0 4 上控制规则的形式不变性,使得这种方法可采用批 t/min 0.3 处理的方式进行控制器设计,也可以应用于其他的 0.2 单入单出的非线性系统的控制中.针对本文的内容 还可以开展后续的研究工作.主要有以下2个方面: 1)研究控制规则的减少对稳定性的影响;2)研究控 3 4 t/min 制参数的最优设计 图73种控制方法的仿真结果 参考文献: Fig.7 Simulation results of three control methods 从图7中可以看出,采用实时简化变论域模糊 [1]赵彦华,麻红昭.一种用于pH值控制的非线性系统的 控制算法,不仅动态响应大大变快,从PD控制的分 实现[J].工业仪表与自动化装置,2004,3:4043. 钟级提高到秒级,而且稳态精度也大幅提高.而且这 ZHAO Yanhua,MA Hongzhao.A new nonlinear system de- 种算法的计算量很小,非常适合实时在线应用.为了 signed for use with pH control[J].Industrial Instrumenta 对3种控制方法进行更清晰的比较,针对pH=7.0 tion Automation,2004,3:40-43. 的控制曲线,分别对3种方法的e和ec作相平面分 [2]HADJISKI M,BOSHNAKOV K,GALIBORA M.Neural 析(如图8所示),从图中可以看出实时简化变论域 networks based control of pH neutralization plant C]// 2002 First International IEEE Symposium on Intelligent Sys-