正在加载图片...
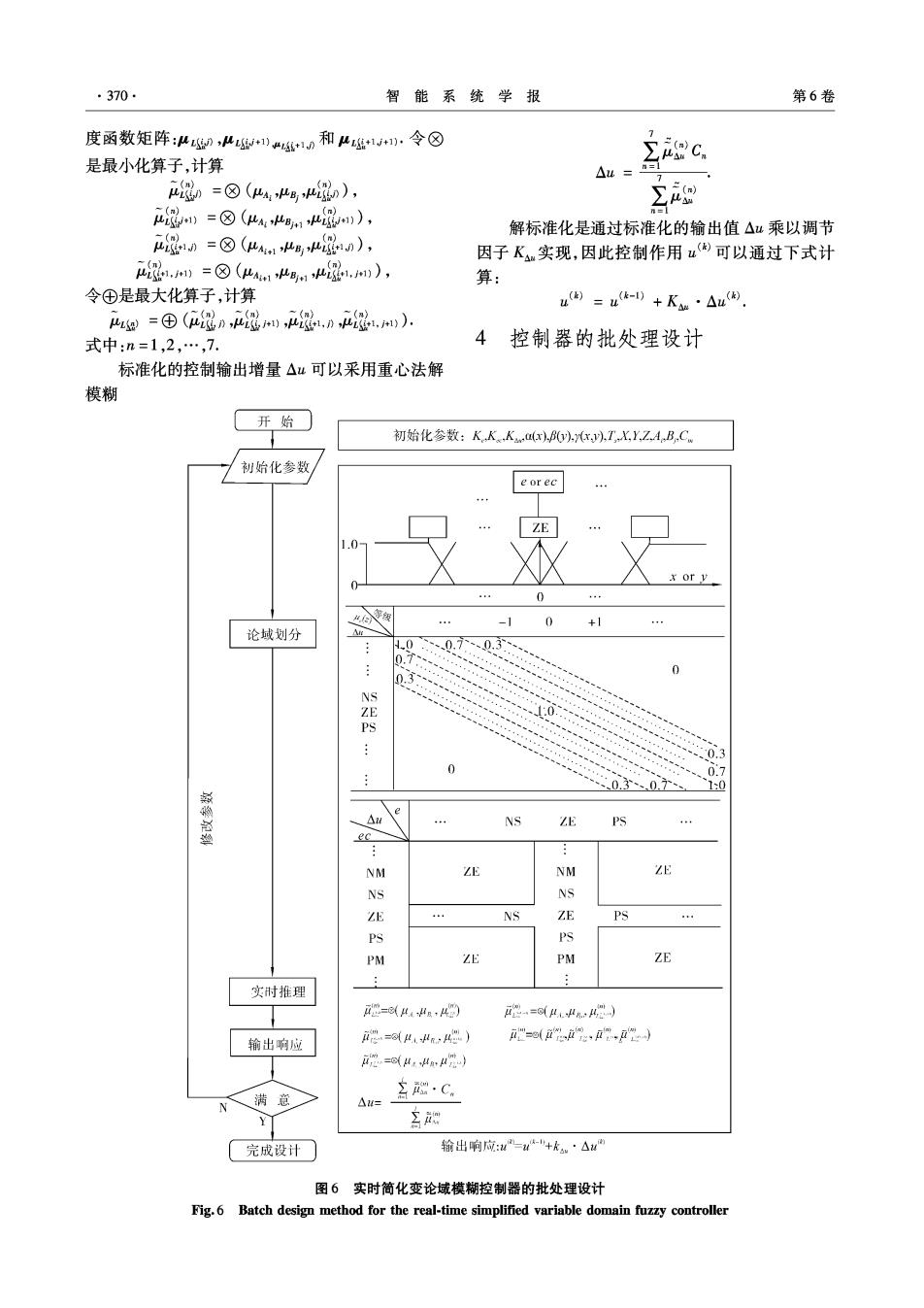
370 智能系统学报 第6卷 度函数矩阵:u,1和1,令⑧ 7 是最小化算子,计算 C. △u= 8=⑧(4g,⑧), 8)=⑧(,hg1h8n), 解标准化是通过标准化的输出值△w乘以调节 品0=⑧(4hh), 因子K实现,因此控制作用u可以通过下式计 绿.)=⑧(1hgh8绿m), 算: 令④是最大化算子,计算 u因=uk-》+K·△u因. ue=①(8nn,,n是w). 式中:n=1,2,…,7. 4 控制器的批处理设计 标准化的控制输出增量△u可以采用重心法解 模糊 开始 初始化参数:K,K,(x)fy)x),T,X,Y,Z.A.B.C 初始化参数 e orec ZE x or v 0 +1 论域划分 0 0,7、0.3 0.7 0 0.3 10. S 0.3 0 0.7 0.3、0.7 10 △ NS ZE PS ec NM ZE NM ZE NS NS ZE 44 NS ZE PS PS PS PM ZE PM ZE 实时推理 =(以4g,4 迟=(4L44) 输出响应 0=4r>4) =@(ii9,a,) i2=6(44) 、满意 名C △u= Y 名 完成设计 输出响应:=-"+ka·△ 图6 实时简化变论域模糊控制器的批处理设计 Fig.6 Batch design method for the real-time simplified variable domain fuzzy controller