正在加载图片...
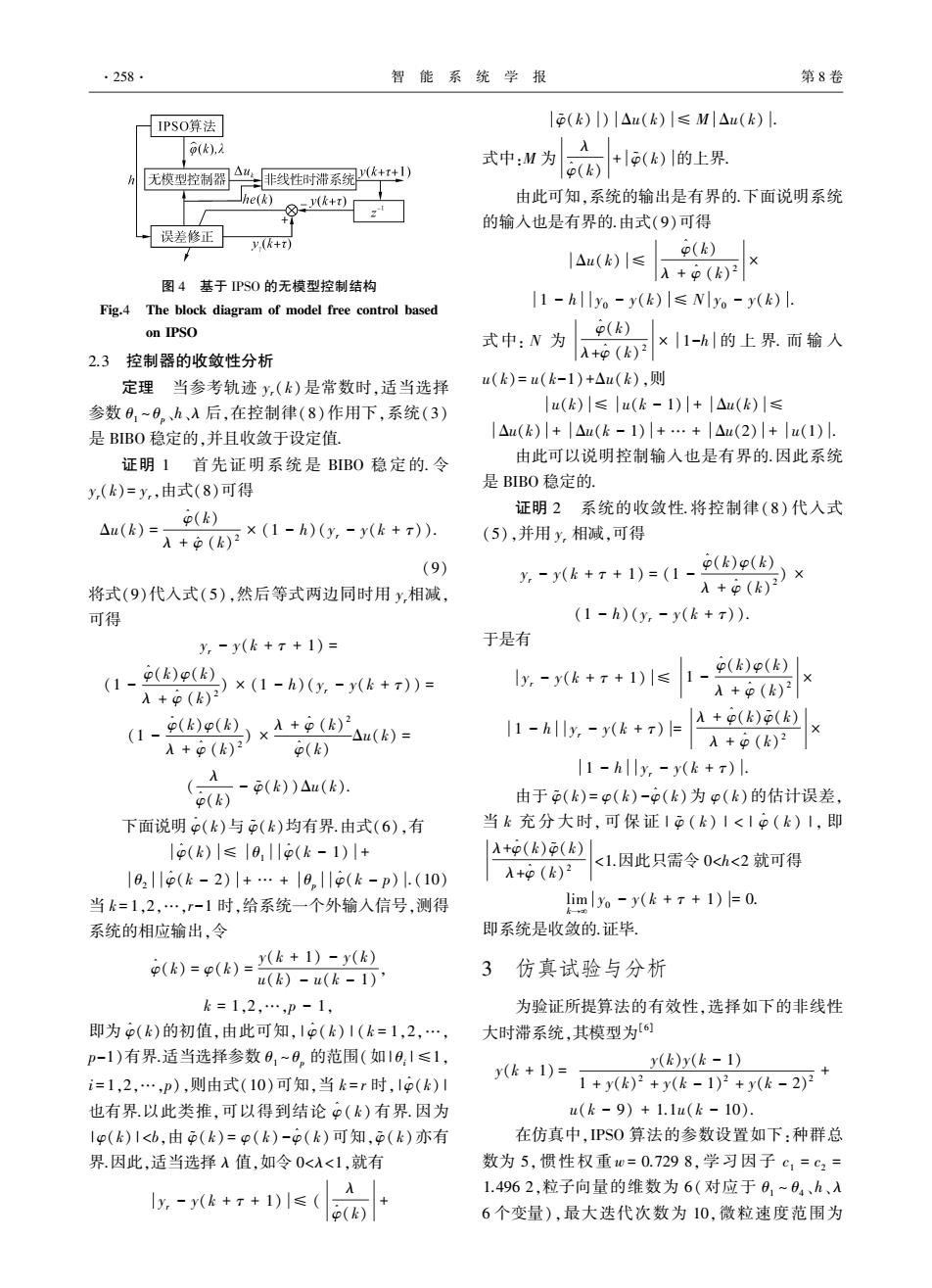
·258- 智能系统学报 第8卷 IPSO算法 |(k)|)|△u(k)|≤M△u(k): (k),2 式中:M为 无模型控制器A非线性时滞系统++) (k) +(k)的上界 he(k) ⑧:(k+) 由此可知,系统的输出是有界的.下面说明系统 + 的输入也是有界的.由式(9)可得 误差修正 y.(k+) |△u(k)|≤ (k) 图4基于PS0的无模型控制结构 A+9()2X Fig.4 The block diagram of model free control based 11-hllyo-y(k)NIYo -y(k) on IPSO 式中:N为 (k) ×|1-h的上界.而输人 2.3控制器的收敛性分析 入+0(k)2 定理当参考轨迹y,(k)是常数时,适当选择 u(k)=u(k-1)+△u(k),则 参数0,~0。h、入后,在控制律(8)作用下,系统(3) u(k)|≤u(k-1)|+|△u(k)|≤ 是BBO稳定的,并且收敛于设定值。 |△u(k)|+|△(k-1)|+…+|△u(2)|+|u(1). 证明1首先证明系统是BIBO稳定的.令 由此可以说明控制输入也是有界的.因此系统 y,(k)=y,由式(8)可得 是BIBO稳定的. 证明2系统的收敛性.将控制律(8)代入式 o(k) 4u(k)=APa×(1-h)(x,-y(k+). (5),并用y,相减,可得 (9) x-(k+7+1)=(1-()() 将式(9)代入式(5),然后等式两边同时用y,相减, 1+9())× 可得 (1-h)(y,-y(k+T)). y,-y(k+T+1)= 于是有 (1-()() 1- (k)o(k) ×(1-h)(y,-y(k+r))= y,-y(k+T+1)|≤ +()2 入+p(k)2 (1-9(k)9(2)xA+94()= |1-h|ly,-y(k+r)= 入+p(k)p(k) A+(k)2 (k) A+9(k)2 11-hlly =y(k+7). -(k))△u(k). (k) 由于(k)=p(k)-p(k)为p(k)的估计误差, 下面说明p(k)与(k)均有界.由式(6),有 当k充分大时,可保证I(k)1<I⊙(k)I,即 Io(k)|≤|8,Ip(k-1)|+ 入+p(k)(k) <1.因此只需令0<h<2就可得 |02|川p(k-2)|+…+16川p(k-p).(10) A+⊙(k)2 当k=1,2,…,-1时,给系统一个外输入信号,测得 lim yo -y(++1)=0. 系统的相应输出,令 即系统是收敛的证毕 P(k)=P(6)=k+)-(6) 3 u(k)-u(k-1)' 仿真试验与分析 k=1,2,…,p-1, 为验证所提算法的有效性,选择如下的非线性 即为p(k)的初值,由此可知,|中(k)1(k=1,2,…, 大时滞系统,其模型为[6 p-1)有界.适当选择参数0,~0,的范围(如10,1≤1, y(k)y(k-1) i=1,2,…,P),则由式(10)可知,当k=r时,1o(k)川 +1)=1+2+4-+k-2+ 也有界以此类推,可以得到结论如(k)有界.因为 u(k-9)+1.1u(k-10) Ip(k)I<b,由(k)=p(k)-p(k)可知,(k)亦有 在仿真中,PS0算法的参数设置如下:种群总 界因此,适当选择入值,如令0<入<1,就有 数为5,惯性权重w=0.7298,学习因子c1=c2= |y,-y(k+r+1)|≤( 1.4962,粒子向量的维数为6(对应于91~0,、h、入 6个变量),最大迭代次数为10,微粒速度范围为图 4 基于 IPSO 的无模型控制结构 Fig.4 The block diagram of model free control based on IPSO 2.3 控制器的收敛性分析 定理 当参考轨迹 yr( k) 是常数时,适当选择 参数 θ1 ~ θp、h、λ 后,在控制律(8)作用下,系统(3) 是 BIBO 稳定的,并且收敛于设定值. 证明 1 首先证明系统是 BIBO 稳定 的. 令 yr(k)= yr,由式(8)可得 Δu(k) = φ ^ (k) λ + φ ^ (k) 2 × (1 - h)(yr - y(k + τ)). (9) 将式(9)代入式(5),然后等式两边同时用 yr相减, 可得 yr - y(k + τ + 1) = (1 - φ ^ (k)φ(k) λ + φ ^ (k) 2 ) × (1 - h)(yr - y(k + τ)) = (1 - φ ^ (k)φ(k) λ + φ ^ (k) 2 ) × λ + φ ^ (k) 2 φ ^ (k) Δu(k) = ( λ φ ^ (k) - φ ~ (k))Δu(k). 下面说明 φ ^ (k)与 φ ~ (k)均有界.由式(6),有 φ ^ (k) ≤ θ1 φ ^ (k - 1) + θ2 φ ^ (k - 2) + … + θp φ ^ (k - p) .(10) 当 k = 1,2,…,r-1 时,给系统一个外输入信号,测得 系统的相应输出,令 φ ^ (k) = φ(k) = y(k + 1) - y(k) u(k) - u(k - 1) , k = 1,2,…,p - 1, 即为 φ ^ (k)的初值,由此可知, | φ ^ ( k) | ( k = 1,2,…, p-1)有界.适当选择参数 θ1 ~ θp 的范围(如 | θi | ≤1, i = 1,2,…,p),则由式(10)可知,当 k = r 时, | φ ^ (k) | 也有界.以此类推,可以得到结论 φ ^ ( k) 有界.因为 | φ(k) | <b,由 φ ~ ( k) = φ( k) -φ ^ ( k) 可知,φ ~ ( k) 亦有 界.因此,适当选择 λ 值,如令 0<λ<1,就有 yr - y(k + τ + 1) ≤ ( λ φ ^ (k) + φ ~ (k) ) Δu(k) ≤ M Δu(k) . 式中:M 为 λ φ ^ (k) + φ ~ (k) 的上界. 由此可知,系统的输出是有界的.下面说明系统 的输入也是有界的.由式(9)可得 Δu(k) ≤ φ ^ (k) λ + φ ^ (k) 2 × 1 - h y0 - y(k) ≤ N y0 - y(k) . 式中: N 为 φ ^ (k) λ+φ ^ (k) 2 × 1-h 的 上 界. 而 输 入 u(k)= u(k-1)+Δu(k),则 u(k) ≤ u(k - 1) + Δu(k) ≤ Δu(k) + Δu(k - 1) + … + Δu(2) + u(1) . 由此可以说明控制输入也是有界的.因此系统 是 BIBO 稳定的. 证明 2 系统的收敛性.将控制律(8) 代入式 (5),并用 yr 相减,可得 yr - y(k + τ + 1) = (1 - φ ^ (k)φ(k) λ + φ ^ (k) 2 ) × (1 - h)(yr - y(k + τ)). 于是有 yr - y(k + τ + 1) ≤ 1 - φ ^ (k)φ(k) λ + φ ^ (k) 2 × 1 - h yr - y(k + τ) = λ + φ ^ (k)φ ~ (k) λ + φ ^ (k) 2 × 1 - h yr - y(k + τ) . 由于 φ ~ (k)= φ(k) -φ ^ (k)为 φ( k)的估计误差, 当 k 充 分 大 时, 可 保 证 | φ ~ ( k ) | < | φ ^ ( k ) | , 即 λ+φ ^ (k)φ ~ (k) λ+φ ^ (k) 2 <1.因此只需令 0<h<2 就可得 lim k→¥ y0 - y(k + τ + 1) = 0. 即系统是收敛的.证毕. 3 仿真试验与分析 为验证所提算法的有效性,选择如下的非线性 大时滞系统,其模型为[6] y(k + 1) = y(k)y(k - 1) 1 + y(k) 2 + y(k - 1) 2 + y(k - 2) 2 + u(k - 9) + 1.1u(k - 10). 在仿真中,IPSO 算法的参数设置如下:种群总 数为 5, 惯性权重 w = 0.729 8, 学习因子 c1 = c2 = 1.496 2,粒子向量的维数为 6(对应于 θ1 ~ θ4 、h、λ 6 个变量),最大迭代次数为 10,微粒速度范围为 ·258· 智 能 系 统 学 报 第 8 卷