正在加载图片...
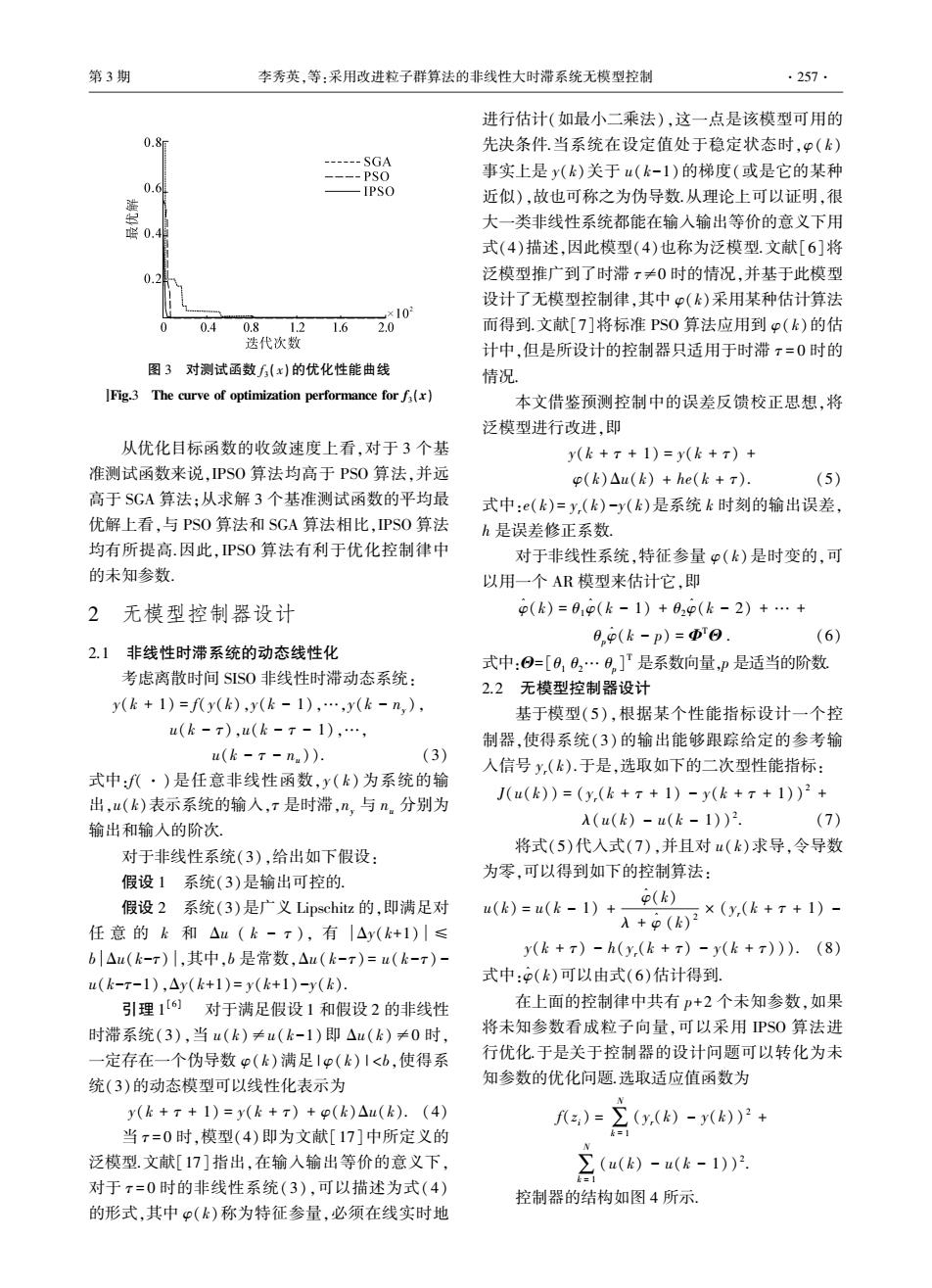
第3期 李秀英,等:采用改进粒子群算法的非线性大时滞系统无模型控制 ·257. 进行估计(如最小二乘法),这一点是该模型可用的 0.8g 先决条件.当系统在设定值处于稳定状态时,φ(k) ------SGA ----PS0 事实上是y(k)关于u(k-1)的梯度(或是它的某种 0.6 -IPSO 近似),故也可称之为伪导数.从理论上可以证明,很 蓝 大一类非线性系统都能在输入输出等价的意义下用 盛0.4 式(4)描述,因此模型(4)也称为泛模型.文献[6]将 0.2 泛模型推广到了时滞?≠0时的情况,并基于此模型 设计了无模型控制律,其中p(k)采用某种估计算法 ×102 0 0.4 0.81.2 1.6 2.0 而得到.文献[7]将标准PS0算法应用到φ(k)的估 迭代次数 计中,但是所设计的控制器只适用于时滞?=0时的 图3对测试函数f(x)的优化性能曲线 情况. Fig.3 The curve of optimization performance for f(x) 本文借鉴预测控制中的误差反馈校正思想,将 泛模型进行改进,即 从优化目标函数的收敛速度上看,对于3个基 y(k+T+1)=y(k+r)+ 准测试函数来说,PS0算法均高于PSO算法,并远 p(k)△u(k)+he(k+r). (5) 高于SGA算法;从求解3个基准测试函数的平均最 式中:(k)=y,(k)-y(k)是系统k时刻的输出误差, 优解上看,与PS0算法和SGA算法相比,PSO算法 h是误差修正系数. 均有所提高.因此,PS0算法有利于优化控制律中 对于非线性系统,特征参量P(k)是时变的,可 的末未知参数 以用一个AR模型来估计它,即 2无模型控制器设计 p(k)=01p(k-1)+02p(k-2)+…+ 0p(k-p)=ΦΘ (6) 2.1非线性时滞系统的动态线性化 式中:0=[68,…6,]”是系数向量,p是适当的阶数 考虑离散时间SISO非线性时滞动态系统: 2.2无模型控制器设计 y(k+1)=f(y(k),y(k-1),…,y(k-n,), 基于模型(5),根据某个性能指标设计一个控 u(k-r),u(k-T-1),…, 制器,使得系统(3)的输出能够跟踪给定的参考输 u(k -t-n.)). (3) 人信号y,(k)于是,选取如下的二次型性能指标: 式中:(·)是任意非线性函数,y(k)为系统的输 出,u(k)表示系统的输入,T是时滞,n,与n。分别为 J(u(k))=(y,(k+T+1)-y(k+T+1)2+ 输出和输入的阶次 A(u(k)-u(k-1))2 (7) 对于非线性系统(3),给出如下假设: 将式(5)代入式(7),并且对u(k)求导,令导数 为零,可以得到如下的控制算法: 假设1系统(3)是输出可控的, 假设2系统(3)是广义Lipschitz的,即满足对 (k)=u(k-1)+9(k) 任意的k和△u(k-T),有△y(k+1)|≤ A+0(xG,(k+7+1)) b|△u(k-T)|,其中,b是常数,△u(k-r)=u(k-r)- y(k+r)-h(y,(k+r)-y(k+r))).(8) u(k-T-1),△y(k+1)=y(k+1)-y(k). 式中:(k)可以由式(6)估计得到. 引理16)对于满足假设1和假设2的非线性 在上面的控制律中共有p+2个未知参数,如果 时滞系统(3),当u(k)≠u(k-1)即△u(k)≠0时, 将未知参数看成粒子向量,可以采用PS0算法进 一定存在一个伪导数P(k)满足Ip(k)I<b,使得系 行优化.于是关于控制器的设计问题可以转化为未 统(3)的动态模型可以线性化表示为 知参数的优化问题选取适应值函数为 y(k+T+1)=y(k+T)+p(k)△u(k).(4) f)=Σ(y.()-y(k)2+ 当r=0时,模型(4)即为文献[17]中所定义的 泛模型.文献[17]指出,在输入输出等价的意义下, 三()-u(k-1)月 对于T=0时的非线性系统(3),可以描述为式(4) 控制器的结构如图4所示 的形式,其中p(k)称为特征参量,必须在线实时地图 3 对测试函数 f 3(x)的优化性能曲线 〛Fig.3 The curve of optimization performance for f3(x) 从优化目标函数的收敛速度上看,对于 3 个基 准测试函数来说,IPSO 算法均高于 PSO 算法,并远 高于 SGA 算法;从求解 3 个基准测试函数的平均最 优解上看,与 PSO 算法和 SGA 算法相比,IPSO 算法 均有所提高.因此,IPSO 算法有利于优化控制律中 的未知参数. 2 无模型控制器设计 2.1 非线性时滞系统的动态线性化 考虑离散时间 SISO 非线性时滞动态系统: y(k + 1) = f(y(k),y(k - 1),…,y(k - ny), u(k - τ),u(k - τ - 1),…, u(k - τ - nu )). (3) 式中:f(·) 是任意非线性函数,y( k) 为系统的输 出,u(k)表示系统的输入,τ 是时滞,ny 与 nu 分别为 输出和输入的阶次. 对于非线性系统(3),给出如下假设: 假设 1 系统(3)是输出可控的. 假设 2 系统(3)是广义 Lipschitz 的,即满足对 任 意 的 k 和 Δu ( k - τ ), 有 Δy(k+1) ≤ b Δu(k-τ) ,其中,b 是常数,Δu( k-τ) = u( k-τ) - u(k-τ-1),Δy(k+1)= y(k+1)-y(k). 引理 1 [6] 对于满足假设 1 和假设 2 的非线性 时滞系统(3),当 u(k)≠u(k-1)即 Δu(k)≠0 时, 一定存在一个伪导数 φ( k)满足 | φ( k) | <b,使得系 统(3)的动态模型可以线性化表示为 y(k + τ + 1) = y(k + τ) + φ(k)Δu(k). (4) 当 τ = 0 时,模型(4)即为文献[17]中所定义的 泛模型.文献[17]指出,在输入输出等价的意义下, 对于 τ = 0 时的非线性系统(3),可以描述为式(4) 的形式,其中 φ(k)称为特征参量,必须在线实时地 进行估计(如最小二乘法),这一点是该模型可用的 先决条件.当系统在设定值处于稳定状态时,φ( k) 事实上是 y(k)关于 u(k-1)的梯度(或是它的某种 近似),故也可称之为伪导数.从理论上可以证明,很 大一类非线性系统都能在输入输出等价的意义下用 式(4)描述,因此模型(4)也称为泛模型.文献[6]将 泛模型推广到了时滞 τ≠0 时的情况,并基于此模型 设计了无模型控制律,其中 φ(k)采用某种估计算法 而得到.文献[7]将标准 PSO 算法应用到 φ(k)的估 计中,但是所设计的控制器只适用于时滞 τ = 0 时的 情况. 本文借鉴预测控制中的误差反馈校正思想,将 泛模型进行改进,即 y(k + τ + 1) = y(k + τ) + φ(k)Δu(k) + he(k + τ). (5) 式中:e(k)= yr(k)-y(k)是系统 k 时刻的输出误差, h 是误差修正系数. 对于非线性系统,特征参量 φ( k)是时变的,可 以用一个 AR 模型来估计它,即 φ ^ (k) = θ1φ ^ (k - 1) + θ2φ ^ (k - 2) + … + θpφ ^ (k - p) = Φ TΘ . (6) 式中:Θ=[θ1 θ2… θp] T 是系数向量,p 是适当的阶数. 2.2 无模型控制器设计 基于模型(5),根据某个性能指标设计一个控 制器,使得系统(3)的输出能够跟踪给定的参考输 入信号 yr(k).于是,选取如下的二次型性能指标: J(u(k)) = (yr(k + τ + 1) - y(k + τ + 1)) 2 + λ(u(k) - u(k - 1)) 2 . (7) 将式(5)代入式(7),并且对 u(k)求导,令导数 为零,可以得到如下的控制算法: u(k) = u(k - 1) + φ ^ (k) λ + φ ^ (k) 2 × (yr(k + τ + 1) - y(k + τ) - h(yr(k + τ) - y(k + τ))). (8) 式中:φ ^ (k)可以由式(6)估计得到. 在上面的控制律中共有 p+2 个未知参数,如果 将未知参数看成粒子向量,可以采用 IPSO 算法进 行优化.于是关于控制器的设计问题可以转化为未 知参数的优化问题.选取适应值函数为 f(zi) = ∑ N k = 1 (yr(k) - y(k)) 2 + ∑ N k = 1 (u(k) - u(k - 1)) 2 . 控制器的结构如图 4 所示. 第 3 期 李秀英,等:采用改进粒子群算法的非线性大时滞系统无模型控制 ·257·