正在加载图片...
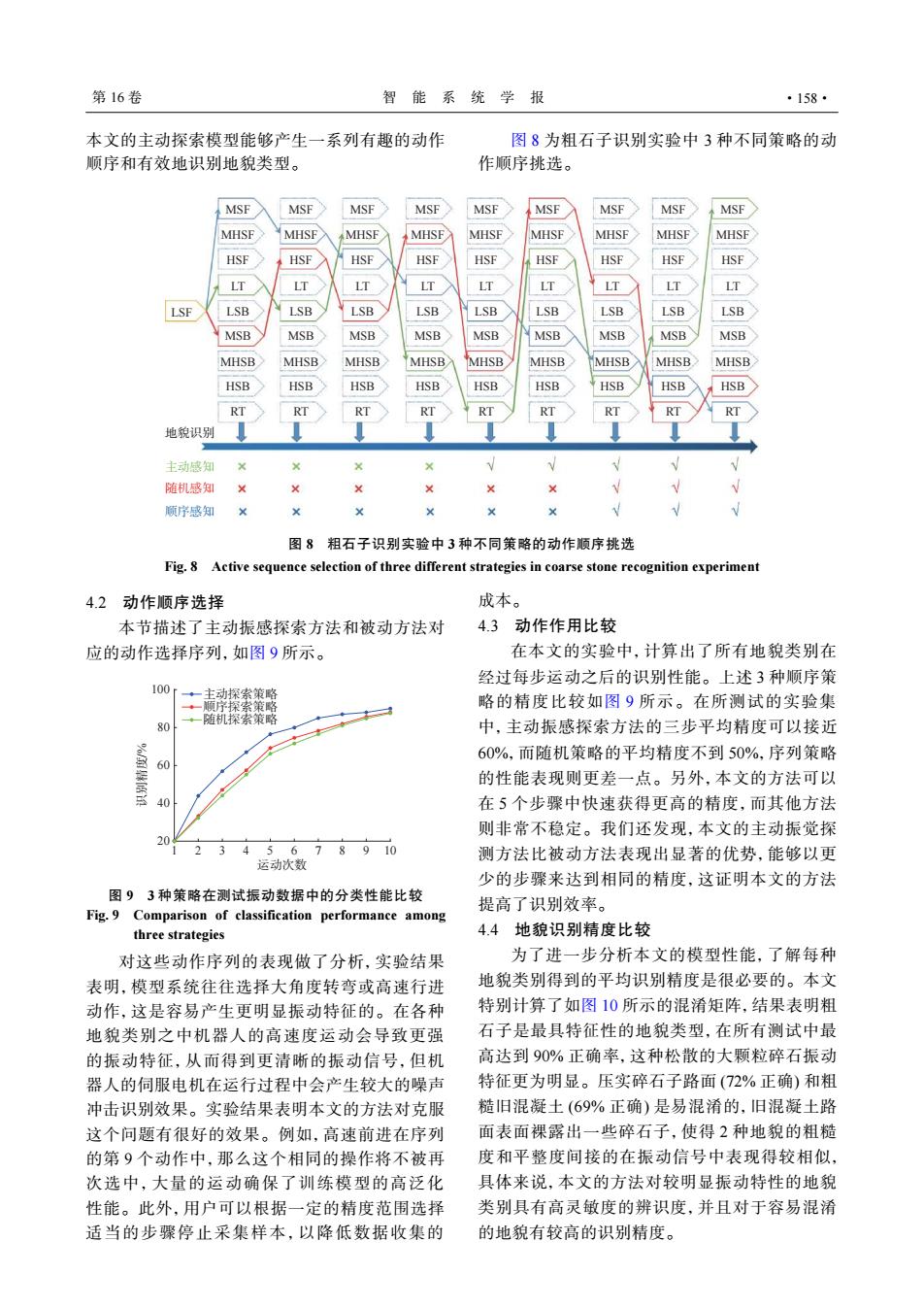
第16卷 智能系统学报 ·158· 本文的主动探索模型能够产生一系列有趣的动作 图8为粗石子识别实验中3种不同策略的动 顺序和有效地识别地貌类型。 作顺序挑选。 MSF MSF MSF MSF MSF MSF MSF MSF MSF MHSF MHSF MHSF MHSE MHSF MHSF MHSF MHSF MHSF HSF HSF HSF HSF HSF HSF HSF HSF HSF LT LT LT LT LT LT LT LT LT LSF LSB LSB LSB LSB LSB LSB LSB LSB LSB MSB MSB MSB MSB MSB MSB MSB MSB MSB MHSB MHSB MHSB MHSB MHSB MHSB MHSB MHSB MHSB HSB HSB HSB HSB HSB HSB HSB HSB HSB RT RT RT RT RT RT RT RT 地貌识别 主动感知 随机感知 × × 顺序感知 + + 图8粗石子识别实验中3种不同策略的动作顺序挑选 Fig.8 Active sequence selection of three different strategies in coarse stone recognition experiment 4.2动作顺序选择 成本 本节描述了主动振感探索方法和被动方法对 4.3动作作用比较 应的动作选择序列,如图9所示。 在本文的实验中,计算出了所有地貌类别在 经过每步运动之后的识别性能。上述3种顺序策 100 ◆一主动探索策略 顺序探索策略 略的精度比较如图9所示。在所测试的实验集 一随机探索策略 中,主动振感探索方法的三步平均精度可以接近 60%,而随机策略的平均精度不到50%,序列策略 的性能表现则更差一点。另外,本文的方法可以 0 在5个步骤中快速获得更高的精度,而其他方法 则非常不稳定。我们还发现,本文的主动振觉探 20 12345678910 测方法比被动方法表现出显著的优势,能够以更 运动次数 少的步骤来达到相同的精度,这证明本文的方法 图93种策略在测试振动数据中的分类性能比较 提高了识别效率。 Fig.9 Comparison of classification performance among three strategies 4.4地貌识别精度比较 对这些动作序列的表现做了分析,实验结果 为了进一步分析本文的模型性能,了解每种 表明,模型系统往往选择大角度转弯或高速行进 地貌类别得到的平均识别精度是很必要的。本文 动作,这是容易产生更明显振动特征的。在各种 特别计算了如图10所示的混淆矩阵,结果表明粗 地貌类别之中机器人的高速度运动会导致更强 石子是最具特征性的地貌类型,在所有测试中最 的振动特征,从而得到更清晰的振动信号,但机 高达到90%正确率,这种松散的大颗粒碎石振动 器人的伺服电机在运行过程中会产生较大的噪声 特征更为明显。压实碎石子路面(72%正确)和粗 冲击识别效果。实验结果表明本文的方法对克服 糙旧混凝土(69%正确)是易混淆的,旧混凝土路 这个问题有很好的效果。例如,高速前进在序列 面表面裸露出一些碎石子,使得2种地貌的粗糙 的第9个动作中,那么这个相同的操作将不被再 度和平整度间接的在振动信号中表现得较相似, 次选中,大量的运动确保了训练模型的高泛化 具体来说,本文的方法对较明显振动特性的地貌 性能。此外,用户可以根据一定的精度范围选择 类别具有高灵敏度的辨识度,并且对于容易混淆 适当的步骤停止采集样本,以降低数据收集的 的地貌有较高的识别精度。本文的主动探索模型能够产生一系列有趣的动作 顺序和有效地识别地貌类型。 图 8 为粗石子识别实验中 3 种不同策略的动 作顺序挑选。 MSF MSF MSF MSF MSF MSF MSF MSF MSF LSF 地貌识别 主动感知 随机感知 顺序感知 MHSF MHSF MHSF MHSF MHSF MHSF MHSF MHSF MHSF MHSB MHSB MHSB MHSB MHSB MHSB MHSB MHSB MHSB HSB HSB HSB HSB HSB HSB HSB HSB HSB RT RT RT RT RT RT RT RT RT HSF HSF HSF HSF HSF HSF HSF HSF HSF LT LT LT LT LT LT LT LT LT LSB LSB LSB LSB LSB LSB LSB LSB LSB MSB MSB MSB MSB MSB MSB MSB MSB MSB 图 8 粗石子识别实验中 3 种不同策略的动作顺序挑选 Fig. 8 Active sequence selection of three different strategies in coarse stone recognition experiment 4.2 动作顺序选择 本节描述了主动振感探索方法和被动方法对 应的动作选择序列,如图 9 所示。 1 2 3 4 5 6 7 8 9 10 运动次数 20 40 60 80 100 识别精度/% 主动探索策略 顺序探索策略 随机探索策略 图 9 3 种策略在测试振动数据中的分类性能比较 Fig. 9 Comparison of classification performance among three strategies 对这些动作序列的表现做了分析,实验结果 表明,模型系统往往选择大角度转弯或高速行进 动作,这是容易产生更明显振动特征的。在各种 地貌类别之中机器人的高速度运动会导致更强 的振动特征,从而得到更清晰的振动信号,但机 器人的伺服电机在运行过程中会产生较大的噪声 冲击识别效果。实验结果表明本文的方法对克服 这个问题有很好的效果。例如,高速前进在序列 的第 9 个动作中,那么这个相同的操作将不被再 次选中,大量的运动确保了训练模型的高泛化 性能。此外,用户可以根据一定的精度范围选择 适当的步骤停止采集样本,以降低数据收集的 成本。 4.3 动作作用比较 在本文的实验中,计算出了所有地貌类别在 经过每步运动之后的识别性能。上述 3 种顺序策 略的精度比较如图 9 所示。在所测试的实验集 中,主动振感探索方法的三步平均精度可以接近 60%,而随机策略的平均精度不到 50%,序列策略 的性能表现则更差一点。另外,本文的方法可以 在 5 个步骤中快速获得更高的精度,而其他方法 则非常不稳定。我们还发现,本文的主动振觉探 测方法比被动方法表现出显著的优势,能够以更 少的步骤来达到相同的精度,这证明本文的方法 提高了识别效率。 4.4 地貌识别精度比较 为了进一步分析本文的模型性能,了解每种 地貌类别得到的平均识别精度是很必要的。本文 特别计算了如图 10 所示的混淆矩阵,结果表明粗 石子是最具特征性的地貌类型,在所有测试中最 高达到 90% 正确率,这种松散的大颗粒碎石振动 特征更为明显。压实碎石子路面 (72% 正确) 和粗 糙旧混凝土 (69% 正确) 是易混淆的,旧混凝土路 面表面裸露出一些碎石子,使得 2 种地貌的粗糙 度和平整度间接的在振动信号中表现得较相似, 具体来说,本文的方法对较明显振动特性的地貌 类别具有高灵敏度的辨识度,并且对于容易混淆 的地貌有较高的识别精度。 第 16 卷 智 能 系 统 学 报 ·158·