正在加载图片...
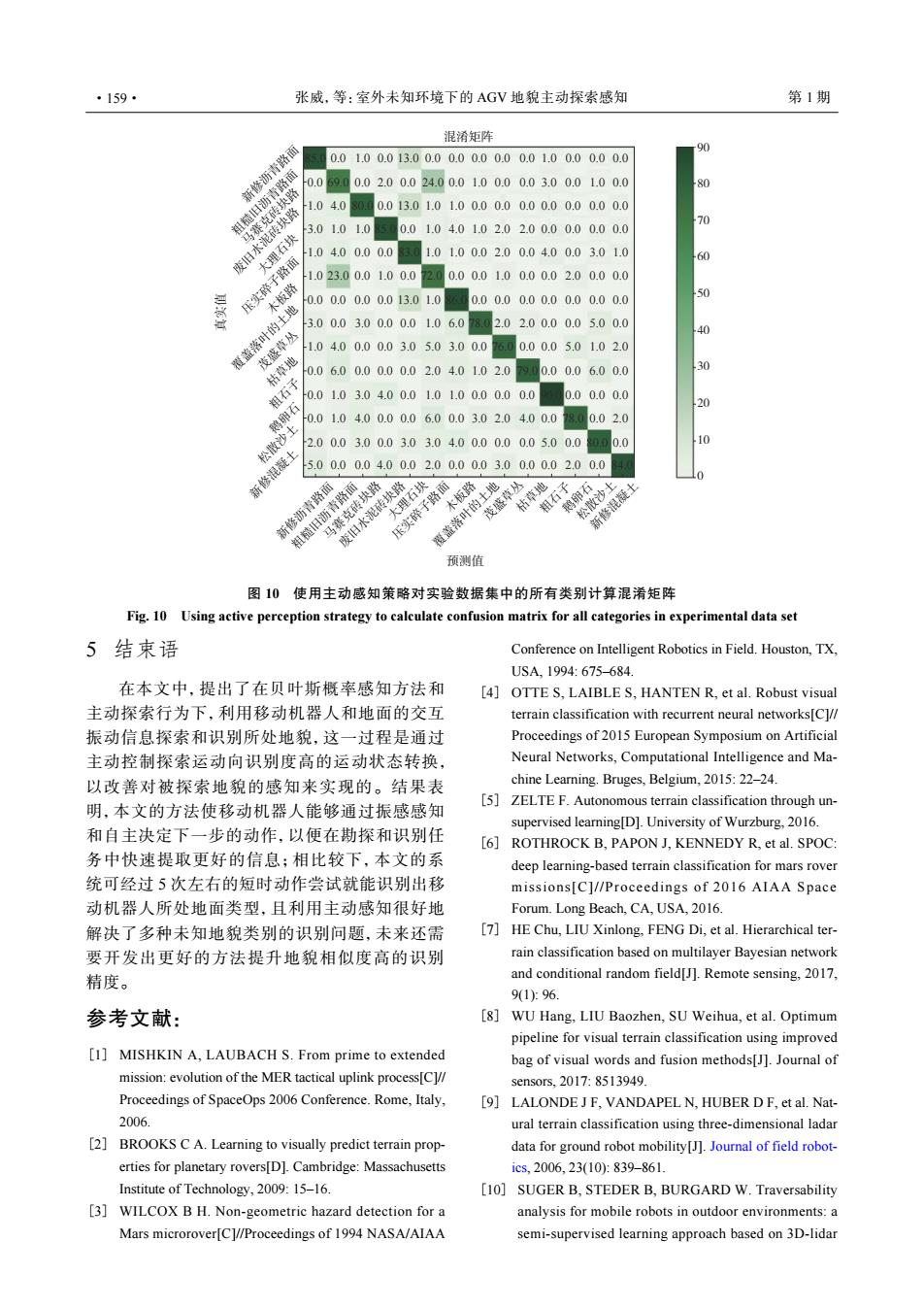
·159· 张威,等:室外未知环境下的AGV地貌主动探索感知 第1期 混淆矩阵 新修沥青路面 50.01.00.013.00.00.00.00.00.01.00.00.00.0 粗糙日沥青路面 0.069.00.02.00.024.00.01.00.00.03.00.01.00.0 80 马赛克砖块路 学30,0.013.01.01.00.00.00.00.00.0 3.01.01.0s0.01.04.01.02.02.00.00.00.00.0 70 大理石块 压实醉子路0400.00.01.01.00.02.00.0400.0301.0 60 1.023.00.01.00.02.00.00.01.00.00.02.00.00.0 木板路 0.00.00.00.013.01.00.00.00.00.00.00.00.0 覆盖落叶的 3.00.03.00.00.01.06.078.02.02.00.00.05.00.0 茂盛草丛 1.04.00.00.03.05.03.00.060.00.05.01.02.0 枯草地 30 粗石子 .06.00.00.00.02040102.00.000600.0 60.01.03.0400.01.0100.00.00.0■0.00.00.0 20 0.01.04.00.00.06.00.03.02.0400.08.00.02.0 松散沙土 2.00.03.00.03.03.04.00.00.00.05.00.0000.0 10 新修混凝土 5.00.00.04.00.02.00.00.03.00.00.02.00.0 4 粗糙用浙青路 新修浙青路面 新修混凝士 预测值 图10使用主动感知策略对实验数据集中的所有类别计算混淆矩阵 Fig.10 Using active perception strategy to calculate confusion matrix for all categories in experimental data set 5结束语 Conference on Intelligent Robotics in Field.Houston,TX. USA.1994:675-684. 在本文中,提出了在贝叶斯概率感知方法和 [4]OTTE S.LAIBLE S.HANTEN R.et al.Robust visual 主动探索行为下,利用移动机器人和地面的交互 terrain classification with recurrent neural networks[Cl// 振动信息探索和识别所处地貌,这一过程是通过 Proceedings of 2015 European Symposium on Artificial 主动控制探索运动向识别度高的运动状态转换, Neural Networks,Computational Intelligence and Ma- 以改善对被探索地貌的感知来实现的。结果表 chine Learning.Bruges,Belgium,2015:22-24. 明,本文的方法使移动机器人能够通过振感感知 [5]ZELTE F.Autonomous terrain classification through un- supervised learning[D].University of Wurzburg,2016. 和自主决定下一步的动作,以便在勘探和识别任 [6]ROTHROCK B,PAPON J,KENNEDY R,et al.SPOC: 务中快速提取更好的信息;相比较下,本文的系 deep learning-based terrain classification for mars rover 统可经过5次左右的短时动作尝试就能识别出移 missions[C]//Proceedings of 2016 AIAA Space 动机器人所处地面类型,且利用主动感知很好地 Forum.Long Beach,CA,USA,2016. 解决了多种未知地貌类别的识别问题,未来还需 [7]HE Chu,LIU Xinlong,FENG Di,et al.Hierarchical ter- 要开发出更好的方法提升地貌相似度高的识别 rain classification based on multilayer Bayesian network 精度。 and conditional random field[J].Remote sensing,2017, 9(1)96. 参考文献: [8]WU Hang.LIU Baozhen,SU Weihua,et al.Optimum pipeline for visual terrain classification using improved [1]MISHKIN A,LAUBACH S.From prime to extended bag of visual words and fusion methods[J].Journal of mission:evolution of the MER tactical uplink process[C/ sensors..2017:8513949. Proceedings of SpaceOps 2006 Conference.Rome,Italy, [9]LALONDE J F.VANDAPEL N.HUBER D F.et al.Nat- 2006. ural terrain classification using three-dimensional ladar [2]BROOKS C A.Learning to visually predict terrain prop- data for ground robot mobility[J].Journal of field robot- erties for planetary rovers[D].Cambridge:Massachusetts ics,2006,23(10:839-861. Institute of Technology,2009:15-16. [10]SUGER B.STEDER B.BURGARD W.Traversability [3]WILCOX B H.Non-geometric hazard detection for a analysis for mobile robots in outdoor environments:a Mars microrover[C]//Proceedings of 1994 NASA/AIAA semi-supervised learning approach based on 3D-lidar新修沥青路面 新修沥青路面 粗糙旧沥青路面 粗糙旧沥青路面 马赛克砖块路 马赛克砖块路 废旧水泥砖块路 废旧水泥砖块路 大理石块 大理石块 压实碎子路面 压实碎子路面 木板路 木板路 覆盖落叶的土地 覆盖落叶的土地 混淆矩阵 真实值 预测值 90 80 70 60 50 40 30 20 10 0 茂盛草丛 茂盛草丛 枯草地 枯草地 粗石子 粗石子 鹅卵石 鹅卵石 松散沙土 松散沙土 新修混凝土 新修混凝土 85.0 0.0 69.0 2.0 24.0 0.0 0.0 0.0 0.0 3.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 13.0 13.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 4.0 4.0 4.0 4.0 4.0 4.0 4.0 4.0 4.0 4.0 5.0 4.0 5.0 5.0 6.0 6.0 6.0 6.0 5.0 5.0 80.0 85.0 83.0 72.0 86.0 78.0 76.0 79.0 90.0 78.0 80.0 2.0 84.0 2.0 2.0 2.0 2.0 2.0 2.0 2.0 2.0 2.0 2.0 2.0 2.0 2.0 1.0 1.0 1.0 1.0 3.0 1.0 1.0 1.0 3.0 3.0 3.0 3.0 3.0 3.0 3.0 3.0 3.0 3.0 3.0 1.0 1.0 1.0 23.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 13.0 1.0 1.0 1.0 图 10 使用主动感知策略对实验数据集中的所有类别计算混淆矩阵 Fig. 10 Using active perception strategy to calculate confusion matrix for all categories in experimental data set 5 结束语 在本文中,提出了在贝叶斯概率感知方法和 主动探索行为下,利用移动机器人和地面的交互 振动信息探索和识别所处地貌,这一过程是通过 主动控制探索运动向识别度高的运动状态转换, 以改善对被探索地貌的感知来实现的。结果表 明,本文的方法使移动机器人能够通过振感感知 和自主决定下一步的动作,以便在勘探和识别任 务中快速提取更好的信息;相比较下,本文的系 统可经过 5 次左右的短时动作尝试就能识别出移 动机器人所处地面类型,且利用主动感知很好地 解决了多种未知地貌类别的识别问题,未来还需 要开发出更好的方法提升地貌相似度高的识别 精度。 参考文献: MISHKIN A, LAUBACH S. From prime to extended mission: evolution of the MER tactical uplink process[C]// Proceedings of SpaceOps 2006 Conference. Rome, Italy, 2006. [1] BROOKS C A. Learning to visually predict terrain properties for planetary rovers[D]. Cambridge: Massachusetts Institute of Technology, 2009: 15–16. [2] WILCOX B H. Non-geometric hazard detection for a Mars microrover[C]//Proceedings of 1994 NASA/AIAA [3] Conference on Intelligent Robotics in Field. Houston, TX, USA, 1994: 675–684. OTTE S, LAIBLE S, HANTEN R, et al. Robust visual terrain classification with recurrent neural networks[C]// Proceedings of 2015 European Symposium on Artificial Neural Networks, Computational Intelligence and Machine Learning. Bruges, Belgium, 2015: 22–24. [4] ZELTE F. Autonomous terrain classification through unsupervised learning[D]. University of Wurzburg, 2016. [5] ROTHROCK B, PAPON J, KENNEDY R, et al. SPOC: deep learning-based terrain classification for mars rover missions[C]//Proceedings of 2016 AIAA Space Forum. Long Beach, CA, USA, 2016. [6] HE Chu, LIU Xinlong, FENG Di, et al. Hierarchical terrain classification based on multilayer Bayesian network and conditional random field[J]. Remote sensing, 2017, 9(1): 96. [7] WU Hang, LIU Baozhen, SU Weihua, et al. Optimum pipeline for visual terrain classification using improved bag of visual words and fusion methods[J]. Journal of sensors, 2017: 8513949. [8] LALONDE J F, VANDAPEL N, HUBER D F, et al. Natural terrain classification using three-dimensional ladar data for ground robot mobility[J]. Journal of field robotics, 2006, 23(10): 839–861. [9] SUGER B, STEDER B, BURGARD W. Traversability analysis for mobile robots in outdoor environments: a semi-supervised learning approach based on 3D-lidar [10] ·159· 张威,等:室外未知环境下的 AGV 地貌主动探索感知 第 1 期