正在加载图片...
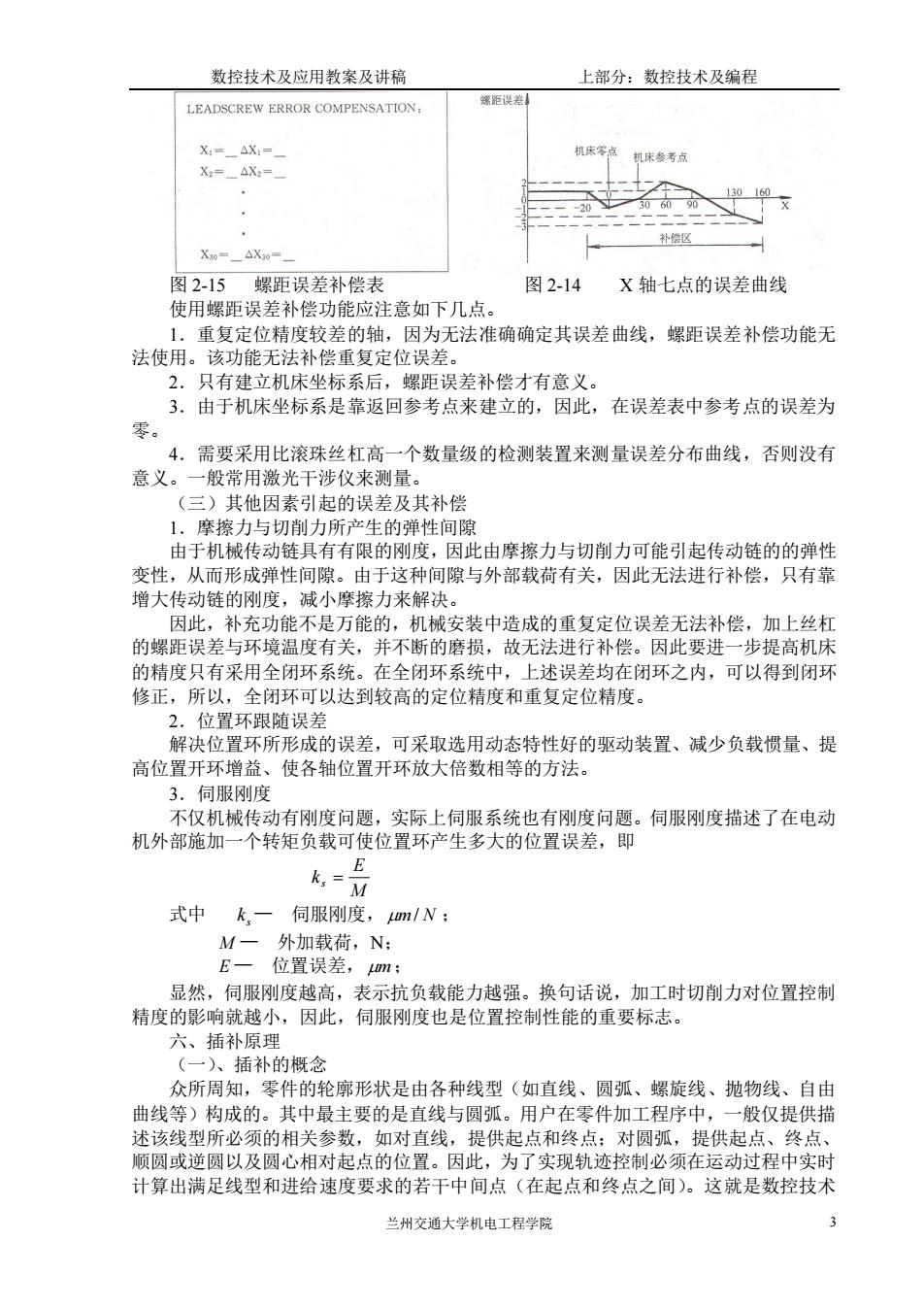
数控技术及应用教案及讲稿 上部分:数控技术及编程 LEADSCREW ERROR COMPENSATION 螺距误差」 机床零点机宋参考 补区 X0=△X0 图2-15 螺距误差补偿表 图2-14 X轴七点的误差曲线 使用螺距误差补偿功能应注意如下几点。 1.重复定位精度较差的轴,因为无法准确确定其误差曲线,螺距误差补偿功能无 法使用。该功能无法补偿重复定位误差。 2.只有建立机床坐标系后,螺距误差补偿才有意义 3.由于机床坐标系是靠返回参考点来建立的,因此,在误差表中参考点的误差为 零。 4.需要采用比滚珠丝杠高一个数量级的检测装置来测量误差分布曲线,否则没有 意义。一般常用激光干涉仪来测量。 (三)其他因素引起的误差及其补偿 摩控力与切尚削力所立生的弹性间 由于 机械传云 有有限的刚 ,因此由摩擦力与切削力可能引起传动链的的弹性 变性,从而形成弹性间隙。由于这种间隙与外部载荷有关,因此无法进行补偿,只有靠 增大传动链的刚度,减小摩擦力来解决。 因此,补充功能不是万能的,机械安装中造成的重复定位误差无法补偿,加上丝杠 的螺距误差与环境温度有关,并不断的磨损,故无法进行补偿。因此要进一步提高机床 的精度只有采用全闭环系统。在全闭环系统中,上述误差均在闭环之内,可以得到闭环 修正,所以,全闭环可以达到较高的定位精度和重复定位精度。 2.位置环跟随误差 解决位置环所形成的误差,可采取选用动态特性好的驱动装置、减少负载惯量、提 高位置开环增益、使各轴位置开环放大倍数相等的方法。 不仅 机械传动有刚度问 实阿 上伺服系统 有度向圈。伺服刚度描述了在电动 机外部施加一个转矩负载可使位置环产生多大的位置误差,即 k,=M 式中k,一 同服刚度,m/N: M 外加载荷,N: E一位置误差,m: 显然,伺服刚度越高,表示抗负载能力越强。换句话说,加工时切削力对位置控制 精度的影响就越小,因此,伺服刚度也是位置控制性能的重要标志。 六、插补原理 (一)、插补的概念 众所周知,零件的轮廓形状是由各种线型(如直线、圆弧、螺旋线、抛物线、自由 曲线等)构成的。其中最主要的是直线与圆弧。用户在零件加工程序中, 一船仅提供 述该线型所必须的相关参数, 提供起点和终 :对圆弧,提供起点、终点 顺圆或逆圆以及圆心相对起点的位置。因此 为了实现轨迹控制必须在运动过程中实时 计算出满足线型和进给速度要求的若干中间点(在起点和终点之间)。这就是数控技术 兰州交通大学机电工程学院 数控技术及应用教案及讲稿 上部分:数控技术及编程 兰州交通大学机电工程学院 3 图 2-15 螺距误差补偿表 图 2-14 X 轴七点的误差曲线 使用螺距误差补偿功能应注意如下几点。 1.重复定位精度较差的轴,因为无法准确确定其误差曲线,螺距误差补偿功能无 法使用。该功能无法补偿重复定位误差。 2.只有建立机床坐标系后,螺距误差补偿才有意义。 3.由于机床坐标系是靠返回参考点来建立的,因此,在误差表中参考点的误差为 零。 4.需要采用比滚珠丝杠高一个数量级的检测装置来测量误差分布曲线,否则没有 意义。一般常用激光干涉仪来测量。 (三)其他因素引起的误差及其补偿 1.摩擦力与切削力所产生的弹性间隙 由于机械传动链具有有限的刚度,因此由摩擦力与切削力可能引起传动链的的弹性 变性,从而形成弹性间隙。由于这种间隙与外部载荷有关,因此无法进行补偿,只有靠 增大传动链的刚度,减小摩擦力来解决。 因此,补充功能不是万能的,机械安装中造成的重复定位误差无法补偿,加上丝杠 的螺距误差与环境温度有关,并不断的磨损,故无法进行补偿。因此要进一步提高机床 的精度只有采用全闭环系统。在全闭环系统中,上述误差均在闭环之内,可以得到闭环 修正,所以,全闭环可以达到较高的定位精度和重复定位精度。 2.位置环跟随误差 解决位置环所形成的误差,可采取选用动态特性好的驱动装置、减少负载惯量、提 高位置开环增益、使各轴位置开环放大倍数相等的方法。 3.伺服刚度 不仅机械传动有刚度问题,实际上伺服系统也有刚度问题。伺服刚度描述了在电动 机外部施加一个转矩负载可使位置环产生多大的位置误差,即 M E ks = 式中 s k — 伺服刚度, m / N ; M — 外加载荷,N; E — 位置误差, m ; 显然,伺服刚度越高,表示抗负载能力越强。换句话说,加工时切削力对位置控制 精度的影响就越小,因此,伺服刚度也是位置控制性能的重要标志。 六、插补原理 (一)、插补的概念 众所周知,零件的轮廓形状是由各种线型(如直线、圆弧、螺旋线、抛物线、自由 曲线等)构成的。其中最主要的是直线与圆弧。用户在零件加工程序中,一般仅提供描 述该线型所必须的相关参数,如对直线,提供起点和终点;对圆弧,提供起点、终点、 顺圆或逆圆以及圆心相对起点的位置。因此,为了实现轨迹控制必须在运动过程中实时 计算出满足线型和进给速度要求的若干中间点(在起点和终点之间)。这就是数控技术