正在加载图片...
第4期 向宏程,等:基于探索群策略鸽群优化的高超声速飞行器飞/发一体化控制 ·851· 标a表示环境参数,d表示进气道后扩散器,02表示 由式(5)(7)可实现高超飞行器升降舵对高 进气道出口,b表示燃烧室,hn表示尾喷管喷嘴, 度输入的响应,为实现高度爬升过程中的速度稳 s表示尾喷管出口。发动机推力计算公式为 定,还需设计推力通道的速度及迎角稳定控制回 T=((1+f)u,-ua).mar Tmar 'mar (4) 路,以求解稳定推力T,基础上的推力变化量△T, 式中:m为简化模型的控制量,表示等效气体质 由速度及迎角控制分别得到其分量△Tv及△T.。 量流量。 △T=△Tv+△Ta 2飞/发一体化系统纵向控制律设计 速度控制目标为由初始稳定速度V,的稳定控 制求解出推力变化量△Tv,其控制律计算公式为 本文重点研究高超飞行器爬升过程中的飞/发 △Tv=(Kg+k(V,- 一体化高度控制,即自主爬升、降落过程中,保持 飞行速度基本稳定,通过升降舵及发动机协调工 迎角控制目标为在具有较大高度爬升需求时 作,对航迹角进行控制从而达到高度控制的目 稳定住迎角以获得较大纵向航迹倾斜角,从而获 的。首先设计高超飞行器纵向多回路高度控制, 得较大爬升速率。由于迎角控制与速度稳定为互 由高度指令h经控制律求解出升降舵6.偏角变化 斥过程,因此在高度爬升需求较小时需要去掉对 量△δ。,由内至外为俯仰角速度q、俯仰角0、高度 迎角的控制以保证速度的稳定。由初始稳定迎角 h的控制回路。俯仰角速度控制回路目标为俯仰 a,的输入求解出推力变化量△T.控制律的计算公 角速度指令q:的跟踪控制,其控制律计算公式为 式为 A6.=- +兰+8a- (5) (a,-a),h-h>1000 俯仰角速度控制回路的输入指令由俯仰角控 0,h4-M≤1000 制回路得到,其目标为俯仰角指令O的跟踪控 制,其控制律计算公式为 由式(1)(4)可知: ga=g+兰+a-0 T=Tmat filasr +Tmar 'mat (6) 式中:T随飞行高度和马赫数变化,可视为慢变 俯仰角控制回路的输人指令由高度控制回路 量,本文忽略其变化率,从而推导出推力控制律 得到,其控制目标为高度输入h的跟踪控制,其 公式为 控制律计算公式为 Am =kr(Ta-T) (+(he-) Ydes V (7) 高超飞行器飞/发一体化系统整体控制结构 如图1所示。 高度控制 俯仰角控制 俯仰角速度控制 T 飞行器 [h,a,8q,门 -PD △m. 本体 Divid 发动机 Ma 速度控制 推力控制 △T 迎角控制 图1飞/发一体化控制系统结构 Fig.1 Diagram of flight engine integrated control systema d 02 b hn s 标 表示环境参数, 表示进气道后扩散器, 表示 进气道出口, 表示燃烧室, 表示尾喷管喷嘴, 表示尾喷管出口。发动机推力计算公式为 T = ((1+ f)us −ud)·mar = Tmar ·mar (4) 式中:mar为简化模型的控制量,表示等效气体质 量流量。 2 飞/发一体化系统纵向控制律设计 hre f δe ∆δe q θ h qdes 本文重点研究高超飞行器爬升过程中的飞/发 一体化高度控制,即自主爬升、降落过程中,保持 飞行速度基本稳定,通过升降舵及发动机协调工 作,对航迹角进行控制从而达到高度控制的目 的。首先设计高超飞行器纵向多回路高度控制, 由高度指令 经控制律求解出升降舵 偏角变化 量 ,由内至外为俯仰角速度 、俯仰角 、高度 的控制回路。俯仰角速度控制回路目标为俯仰 角速度指令 的跟踪控制,其控制律计算公式为 ∆δe = − ( k q p + k q i s +k q d s ) ·(qdes −q) (5) θdes 俯仰角速度控制回路的输入指令由俯仰角控 制回路得到,其目标为俯仰角指令 的跟踪控 制,其控制律计算公式为 qdes = ( k θ p + k θ i s +k θ d s ) ·(θdes −θ) (6) hre f 俯仰角控制回路的输入指令由高度控制回路 得到,其控制目标为高度输入 的跟踪控制,其 控制律计算公式为 γdes = ( k h p +k h d s ) · ( hre f −h ) V θdes = γdes +α (7) Ts ∆T ∆TV ∆Tα 由式 (5)~(7) 可实现高超飞行器升降舵对高 度输入的响应,为实现高度爬升过程中的速度稳 定,还需设计推力通道的速度及迎角稳定控制回 路,以求解稳定推力 基础上的推力变化量 , 由速度及迎角控制分别得到其分量 及 。 ∆T = ∆TV + ∆Tα Vs ∆TV 速度控制目标为由初始稳定速度 的稳定控 制求解出推力变化量 ,其控制律计算公式为 ∆TV = ( k V p +k V d s ) ·(Vs −V) αs ∆Tα 迎角控制目标为在具有较大高度爬升需求时 稳定住迎角以获得较大纵向航迹倾斜角,从而获 得较大爬升速率。由于迎角控制与速度稳定为互 斥过程,因此在高度爬升需求较小时需要去掉对 迎角的控制以保证速度的稳定。由初始稳定迎角 的输入求解出推力变化量 控制律的计算公 式为 ∆Tα = ( k V p + k V i s +k V d s ) ·(αs −α), |href −h| > 1 000 0,
hre f −h
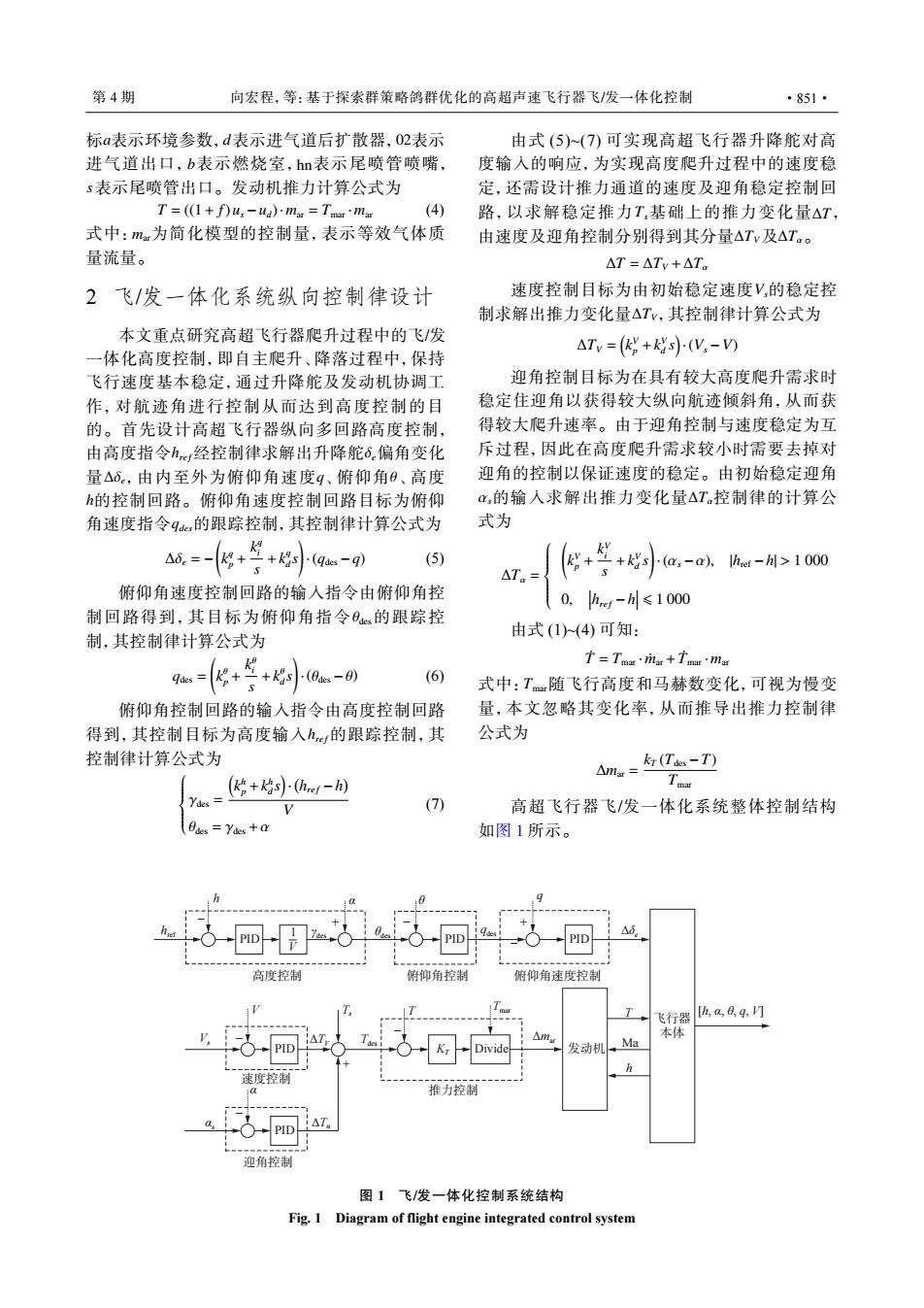
⩽ 1 000 由式 (1)~(4) 可知: T˙ = Tmar ·m˙ ar +T˙ mar ·mar 式中: Tmar随飞行高度和马赫数变化,可视为慢变 量,本文忽略其变化率,从而推导出推力控制律 公式为 ∆mar = kT (Tdes −T) Tmar 高超飞行器飞/发一体化系统整体控制结构 如图 1 所示。 飞行器 本体 发动机 href qdes − Δδe 俯仰角速度控制 PID q + PID − 俯仰角控制 + PID γdes θdes α θ α 1 V h − 高度控制 T Ma h Δmar + Vs αs Tdes Ts KT T Tmar Divide − 推力控制 PID V − PID − 迎角控制 速度控制 ΔTV ΔTα [h, α, θ, q, V] 图 1 飞/发一体化控制系统结构 Fig. 1 Diagram of flight engine integrated control system 第 4 期 向宏程,等:基于探索群策略鸽群优化的高超声速飞行器飞/发一体化控制 ·851·