正在加载图片...
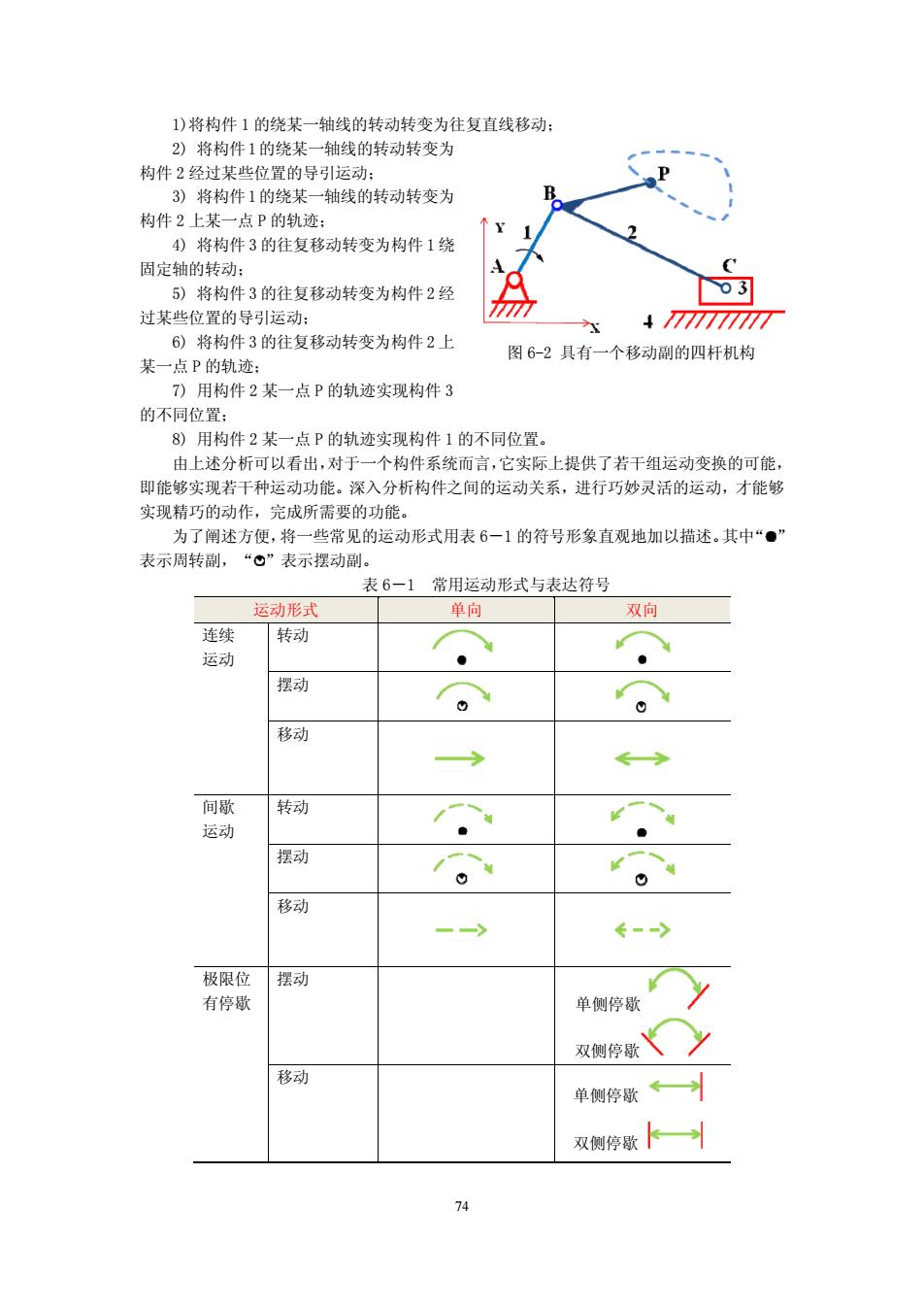
1)将构件1的绕某一轴线的转动转变为往复直线移动: 2)将构件1的绕某一轴线的转动转变为 构件2经过某些位置的导引运动: 3)将构件1的绕某一轴线的转动转变为 构件2上某一点P的轨迹: 4)将构件3的往复移动转变为构件1绕 固定轴的转动: 5)将构件3的往复移动转变为构件2经 3 过某些位置的导引运动: +777777 6)将构件3的往复移动转变为构件2上 图6-2具有一个移动副的四杆机构 某一点P的轨迹: 7)用构件2某一点P的轨迹实现构件3 的不同位置: 8)用构件2某一点P的轨迹实现构件1的不同位置。 由上述分析可以看出,对于一个构件系统而言,它实际上提供了若干组运动变换的可能, 即能够实现若干种运动功能。深入分析构件之间的运动关系,进行巧妙灵活的运动,才能够 实现精巧的动作,完成所需要的功能。 为了阐述方便,将一些常见的运动形式用表6一1的符号形象直观地加以描述。其中“●” 表示周转副,“⊙”表示摆动副。 表6一1常用运动形式与表达符号 运动形式 单向 双向 连续 转动 运动 ● 摆动 移动 ←) 间歇 转动 运动 摆动 移动 ←=> 极限位 摆动 有停歇 单侧停歇 双侧停歇 移动 单侧停歇 双侧停歇 7474 1)将构件 1 的绕某一轴线的转动转变为往复直线移动; 2) 将构件 1的绕某一轴线的转动转变为 构件 2 经过某些位置的导引运动; 3) 将构件 1的绕某一轴线的转动转变为 构件 2 上某一点 P 的轨迹; 4) 将构件 3 的往复移动转变为构件 1 绕 固定轴的转动; 5) 将构件 3 的往复移动转变为构件 2 经 过某些位置的导引运动; 6) 将构件 3 的往复移动转变为构件 2 上 某一点 P 的轨迹; 7) 用构件 2 某一点 P 的轨迹实现构件 3 的不同位置; 8) 用构件 2 某一点 P 的轨迹实现构件 1 的不同位置。 由上述分析可以看出,对于一个构件系统而言,它实际上提供了若干组运动变换的可能, 即能够实现若干种运动功能。深入分析构件之间的运动关系,进行巧妙灵活的运动,才能够 实现精巧的动作,完成所需要的功能。 为了阐述方便,将一些常见的运动形式用表 6-1 的符号形象直观地加以描述。其中“ ” 表示周转副,“ ”表示摆动副。 表 6-1 常用运动形式与表达符号 运动形式 单向 双向 连续 运动 转动 摆动 移动 间歇 运动 转动 摆动 移动 极限位 有停歇 摆动 单侧停歇 双侧停歇 移动 单侧停歇 双侧停歇 图 6-2 具有一个移动副的四杆机构