正在加载图片...
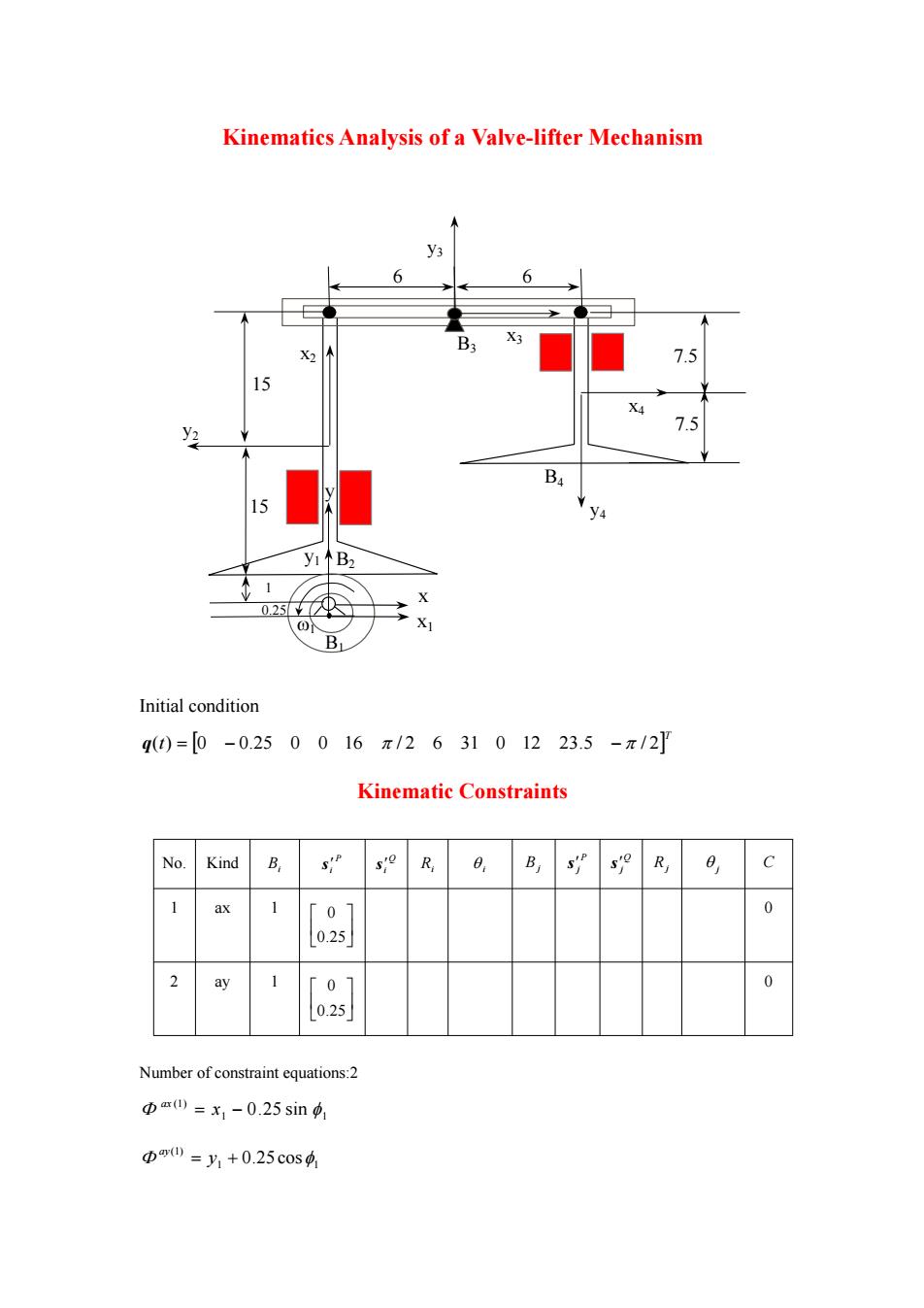
Kinematics Analysis of a Valve-lifter Mechanism y3 6 6 B3 X3 2 7.5 15 y2 7.5 B 15 A y1个B2 0.257 ) Initial condition q0=[0-0.250016π/263101223.5-π/2 Kinematic Constraints No. Kind 足 sio 0, so R, 8, C 1 ax 1 01 0 0.25 2 ay 0 0 0.25 Number of constraint equations:2 Φmm=x1-0.25sin91 Φm0=y1+0.25c0s4Kinematics Analysis of a Valve-lifter Mechanism B4 B3 x B1 x2 B2 1 0.25 1 15 6 7.5 6 y x1 y1 y2 x3 y3 15 7.5 y4 x4 Initial condition T q(t) 0 0.25 0 0 16 / 2 6 31 0 12 23.5 / 2 Kinematic Constraints No. Kind Bi P i s Q i s Ri i B j P j s Q j s R j j C 1 ax 1 0.25 0 0 2 ay 1 0.25 0 0 Number of constraint equations:2 1 1 (1) x 0.25 sin ax 1 1 (1) y 0.25 cos ay