正在加载图片...
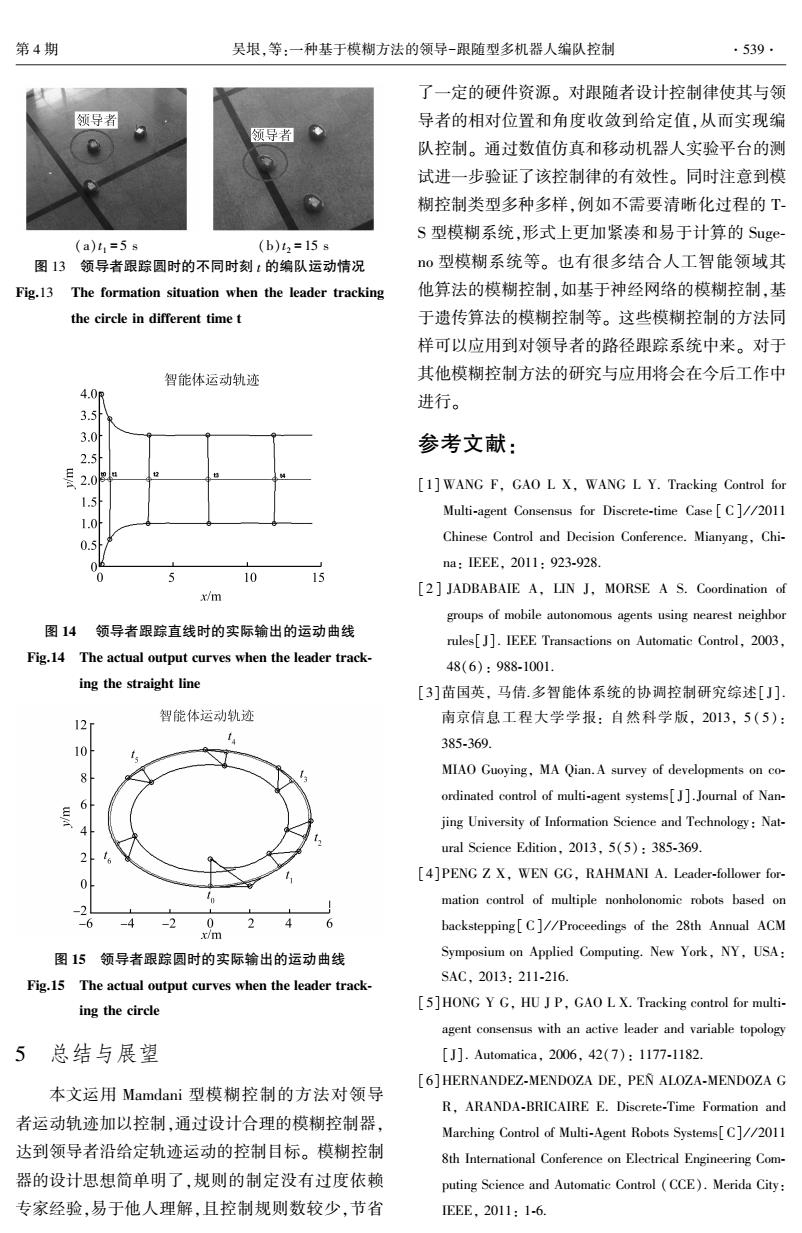
第4期 吴垠,等:一种基于模糊方法的领导-跟随型多机器人编队控制 ·539. 了一定的硬件资源。对跟随者设计控制律使其与领 领导者 导者的相对位置和角度收敛到给定值,从而实现编 领导者 队控制。通过数值仿真和移动机器人实验平台的测 试进一步验证了该控制律的有效性。同时注意到模 糊控制类型多种多样,例如不需要清晰化过程的T s型模糊系统,形式上更加紧凑和易于计算的Suge (a)t1=58 (b)t2=158 图13领导者跟踪圆时的不同时刻:的编队运动情况 o型模糊系统等。也有很多结合人工智能领域其 Fig.13 The formation situation when the leader tracking 他算法的模糊控制,如基于神经网络的模糊控制,基 the circle in different time t 于遗传算法的模糊控制等。这些模糊控制的方法同 样可以应用到对领导者的路径跟踪系统中来。对于 智能体运动轨迹 其他模糊控制方法的研究与应用将会在今后工作中 4.0R 进行。 3.5 参考文献: 2.0 [1]WANG F,GAO L X,WANG L Y.Tracking Control for 1.5 Multi-agent Consensus for Discrete-time Case [C]//2011 1.0 0.5 Chinese Control and Decision Conference.Mianyang,Chi- 0 na:EEE,2011:923-928. 10 [2]JADBABAIE A,LIN J,MORSE A S.Coordination of x/m groups of mobile autonomous agents using nearest neighbor 图14领导者跟踪直线时的实际输出的运动曲线 rules[J].IEEE Transactions on Automatic Control,2003, Fig.14 The actual output curves when the leader track- 48(6):988-1001. ing the straight line [3]苗国英,马倩.多智能体系统的协调控制研究综述[J]: 智能体运动轨迹 12T 南京信息工程大学学报:自然科学版,2013,5(5): 10 385-369. MIAO Guoying,MA Qian.A survey of developments on co- ordinated control of multi-agent systems[J].Journal of Nan- 目 6 jing University of Information Science and Technology:Nat- ural Science Edition,2013,5(5):385-369. 2 [4]PENG Z X,WEN GG,RAHMANI A.Leader-follower for- 0 mation control of multiple nonholonomic robots based on 2 -2 024 6 backstepping[C]//Proceedings of the 28th Annual ACM r/m 图15领导者跟踪圆时的实际输出的运动曲线 Symposium on Applied Computing.New York,NY,USA: Fig.15 The actual output curves when the leader track- SAC,2013:211-216. ing the circle [5]HONG Y G,HU J P,GAO L X.Tracking control for multi- agent consensus with an active leader and variable topology 5总结与展望 [J].Automatica.,2006,42(7):1177-1182. [6]HERNANDEZ-MENDOZA DE,PEN ALOZA-MENDOZA G 本文运用Mamdani型模糊控制的方法对领导 R,ARANDA-BRICAIRE E.Discrete-Time Formation and 者运动轨迹加以控制,通过设计合理的模糊控制器, Marching Control of Multi-Agent Robots Systems[C]//2011 达到领导者沿给定轨迹运动的控制目标。模糊控制 8th International Conference on Electrical Engineering Com- 器的设计思想简单明了,规则的制定没有过度依赖 puting Science and Automatic Control (CCE).Merida City: 专家经验,易于他人理解,且控制规则数较少,节省 EEE,2011:1-6.(a)t 1 = 5 s (b)t 2 = 15 s 图 13 领导者跟踪圆时的不同时刻 t 的编队运动情况 Fig.13 The formation situation when the leader tracking the circle in different time t 图 14 领导者跟踪直线时的实际输出的运动曲线 Fig.14 The actual output curves when the leader track⁃ ing the straight line 图 15 领导者跟踪圆时的实际输出的运动曲线 Fig.15 The actual output curves when the leader track⁃ ing the circle 5 总结与展望 本文运用 Mamdani 型模糊控制的方法对领导 者运动轨迹加以控制,通过设计合理的模糊控制器, 达到领导者沿给定轨迹运动的控制目标。 模糊控制 器的设计思想简单明了,规则的制定没有过度依赖 专家经验,易于他人理解,且控制规则数较少,节省 了一定的硬件资源。 对跟随者设计控制律使其与领 导者的相对位置和角度收敛到给定值,从而实现编 队控制。 通过数值仿真和移动机器人实验平台的测 试进一步验证了该控制律的有效性。 同时注意到模 糊控制类型多种多样,例如不需要清晰化过程的 T⁃ S 型模糊系统,形式上更加紧凑和易于计算的 Suge⁃ no 型模糊系统等。 也有很多结合人工智能领域其 他算法的模糊控制,如基于神经网络的模糊控制,基 于遗传算法的模糊控制等。 这些模糊控制的方法同 样可以应用到对领导者的路径跟踪系统中来。 对于 其他模糊控制方法的研究与应用将会在今后工作中 进行。 参考文献: [1] WANG F, GAO L X, WANG L Y. Tracking Control for Multi⁃agent Consensus for Discrete⁃time Case [ C] / / 2011 Chinese Control and Decision Conference. Mianyang, Chi⁃ na: IEEE, 2011: 923⁃928. [2 ] JADBABAIE A, LIN J, MORSE A S. Coordination of groups of mobile autonomous agents using nearest neighbor rules[J]. IEEE Transactions on Automatic Control, 2003, 48(6): 988⁃1001. [3]苗国英, 马倩.多智能体系统的协调控制研究综述[ J]. 南京信息工程大学学报: 自然科学版, 2013, 5 ( 5): 385⁃369. MIAO Guoying, MA Qian.A survey of developments on co⁃ ordinated control of multi⁃agent systems[J].Journal of Nan⁃ jing University of Information Science and Technology: Nat⁃ ural Science Edition, 2013, 5(5): 385⁃369. [4]PENG Z X, WEN GG, RAHMANI A. Leader⁃follower for⁃ mation control of multiple nonholonomic robots based on backstepping[ C] / / Proceedings of the 28th Annual ACM Symposium on Applied Computing. New York, NY, USA: SAC, 2013: 211⁃216. [5]HONG Y G, HU J P, GAO L X. Tracking control for multi⁃ agent consensus with an active leader and variable topology [J]. Automatica, 2006, 42(7): 1177⁃1182. [6]HERNANDEZ⁃MENDOZA DE, PEÑ ALOZA⁃MENDOZA G R, ARANDA⁃BRICAIRE E. Discrete⁃Time Formation and Marching Control of Multi⁃Agent Robots Systems[C] / / 2011 8th International Conference on Electrical Engineering Com⁃ puting Science and Automatic Control (CCE). Merida City: IEEE, 2011: 1⁃6. 第 4 期 吴垠,等:一种基于模糊方法的领导-跟随型多机器人编队控制 ·539·