正在加载图片...
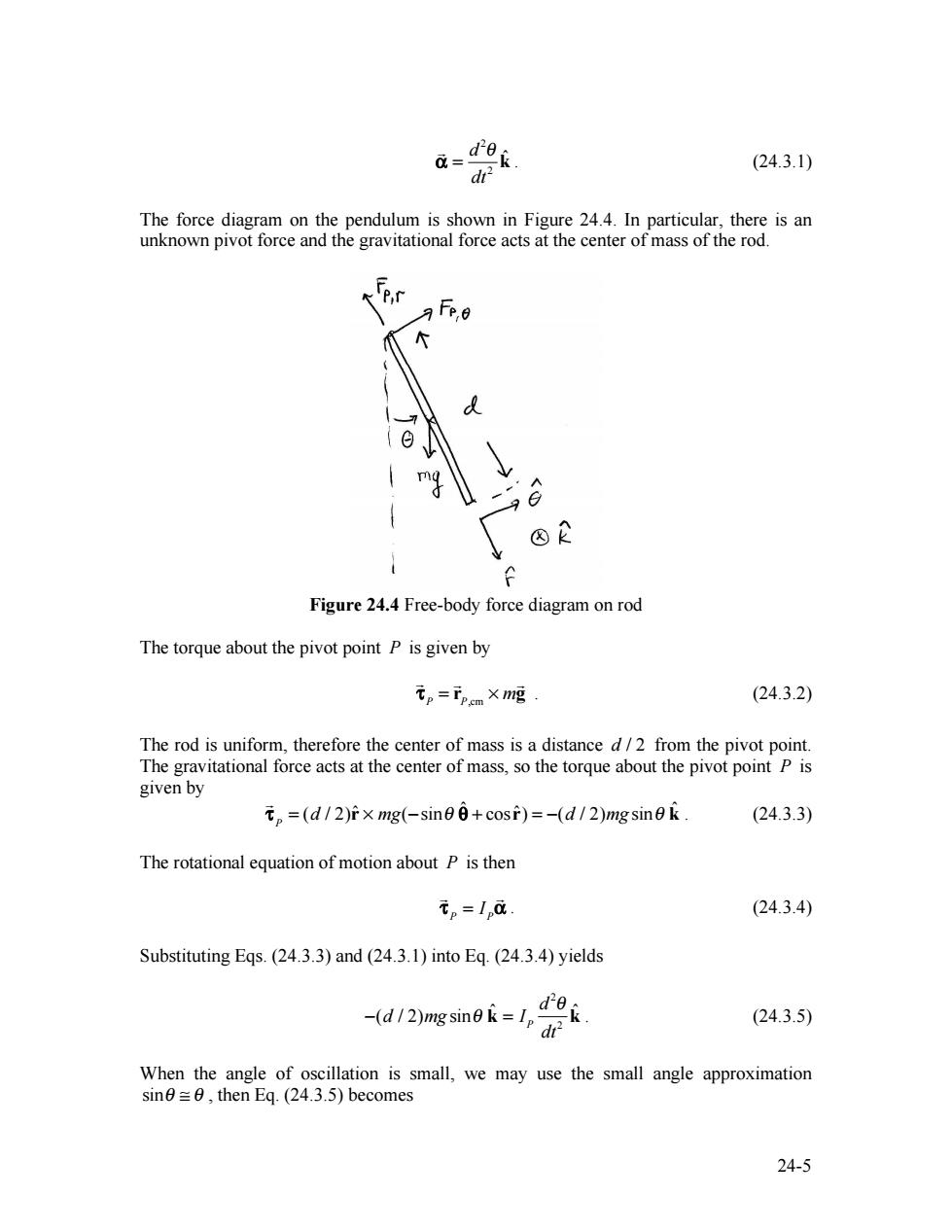
a= doi. (24.3.1) dr The force diagram on the pendulum is shown in Figure 24.4.In particular,there is an unknown pivot force and the gravitational force acts at the center of mass of the rod. 'Pr 个 m 因E Figure 24.4 Free-body force diagram on rod The torque about the pivot point P is given by 元p=Tpem x mg. (24.3.2) The rod is uniform,therefore the center of mass is a distance d/2 from the pivot point. The gravitational force acts at the center of mass,so the torque about the pivot point P is given by 元p=(d/2)f×mg(-sin66+cosf)=-(d/2)mg sin0k (24.3.3) The rotational equation of motion about P is then =Ia. (24.3.4) Substituting Egs.(24.3.3)and(24.3.1)into Eq.(24.3.4)yields -(d12)mg sin (24.3.5) When the angle of oscillation is small,we may use the small angle approximation sin0≡8,then Eq.(24.3.S)becomes 24-524-5 α = d2 θ dt 2 kˆ . (24.3.1) The force diagram on the pendulum is shown in Figure 24.4. In particular, there is an unknown pivot force and the gravitational force acts at the center of mass of the rod. Figure 24.4 Free-body force diagram on rod The torque about the pivot point P is given by τ P = rP,cm × m g . (24.3.2) The rod is uniform, therefore the center of mass is a distance d / 2 from the pivot point. The gravitational force acts at the center of mass, so the torque about the pivot point P is given by τ P = (d / 2)rˆ × mg(−sinθ ˆ θ + cosrˆ) = −(d / 2)mg sinθ kˆ . (24.3.3) The rotational equation of motion about P is then τ P = IP α . (24.3.4) Substituting Eqs. (24.3.3) and (24.3.1) into Eq. (24.3.4) yields −(d / 2)mg sinθ kˆ = IP d2 θ dt 2 kˆ . (24.3.5) When the angle of oscillation is small, we may use the small angle approximation sinθ ≅ θ , then Eq. (24.3.5) becomes