正在加载图片...
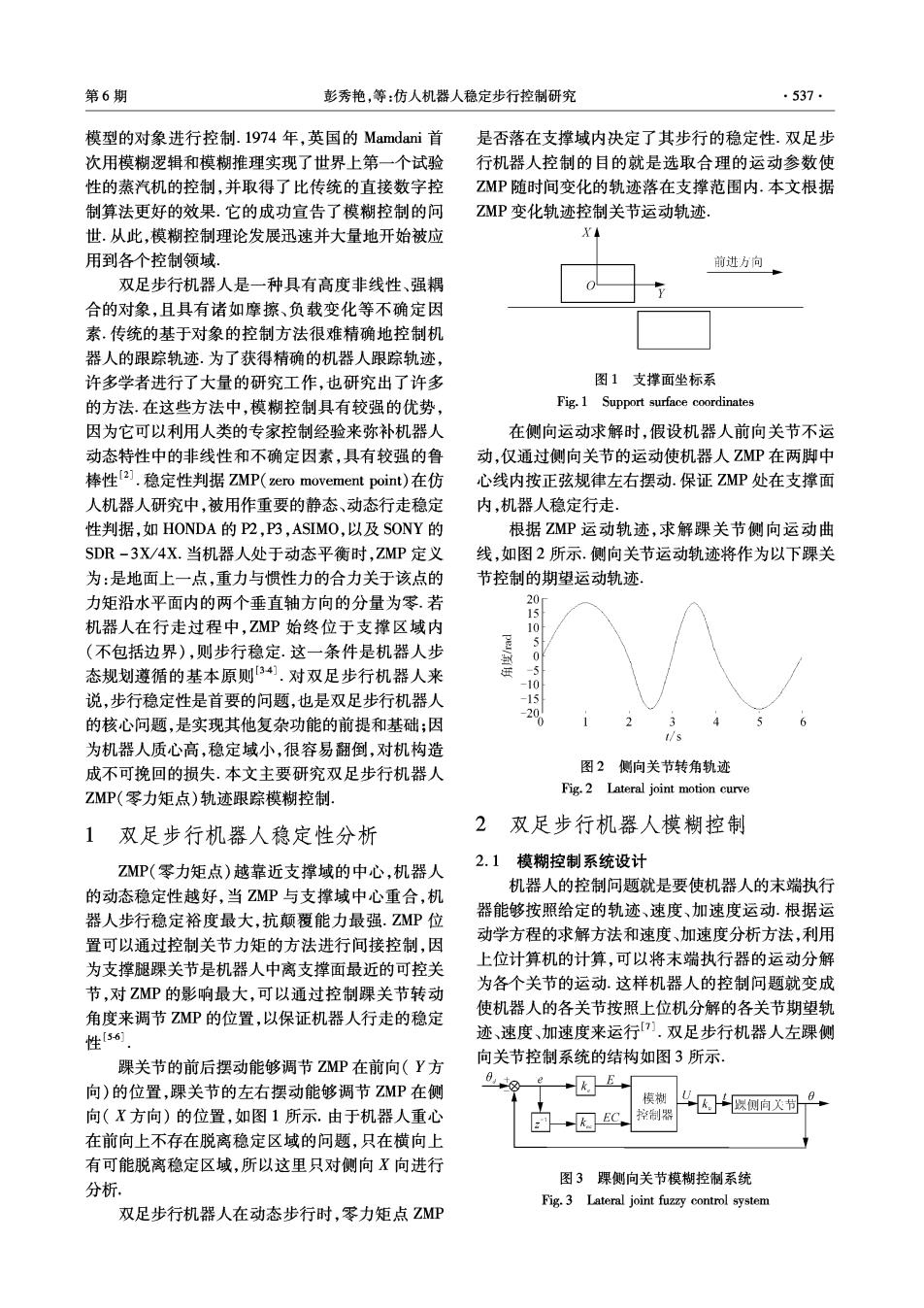
第6期 彭秀艳,等:仿人机器人稳定步行控制研究 ·537 模型的对象进行控制.1974年,英国的Mamdani首 是否落在支撑域内决定了其步行的稳定性.双足步 次用模糊逻辑和模糊推理实现了世界上第一个试验 行机器人控制的目的就是选取合理的运动参数使 性的蒸汽机的控制,并取得了比传统的直接数字控 ZMP随时间变化的轨迹落在支撑范围内.本文根据 制算法更好的效果.它的成功宣告了模糊控制的问 Z△MP变化轨迹控制关节运动轨迹, 世.从此,模糊控制理论发展迅速并大量地开始被应 用到各个控制领域。 前进力向 双足步行机器人是一种具有高度非线性、强耦 合的对象,且具有诸如摩擦、负载变化等不确定因 素.传统的基于对象的控制方法很难精确地控制机 器人的跟踪轨迹.为了获得精确的机器人跟踪轨迹, 许多学者进行了大量的研究工作,也研究出了许多 图1支撑面坐标系 的方法.在这些方法中,模糊控制具有较强的优势, Fig.1 Support surface coordinates 因为它可以利用人类的专家控制经验来弥补机器人 在侧向运动求解时,假设机器人前向关节不运 动态特性中的非线性和不确定因素,具有较强的鲁 动,仅通过侧向关节的运动使机器人ZMP在两脚中 棒性[2].稳定性判据ZMP(zero movement point)在仿 心线内按正弦规律左右摆动.保证ZMP处在支撑面 人机器人研究中,被用作重要的静态、动态行走稳定 内,机器人稳定行走 性判据,如HONDA的P2,P3,ASIMO,以及SONY的 根据ZMP运动轨迹,求解踝关节侧向运动曲 SDR-3X/4X.当机器人处于动态平衡时,ZMP定义 线,如图2所示.侧向关节运动轨迹将作为以下踝关 为:是地面上一点,重力与惯性力的合力关于该点的 节控制的期望运动轨迹, 力矩沿水平面内的两个垂直轴方向的分量为零.若 20 15 机器人在行走过程中,ZMP始终位于支撑区域内 10 (不包括边界),则步行稳定.这一条件是机器人步 0 态规划遵循的基本原则34们.对双足步行机器人来 10 说,步行稳定性是首要的问题,也是双足步行机器人 -1 的核心问题,是实现其他复杂功能的前提和基础;因 29 t/s 为机器人质心高,稳定域小,很容易翻倒,对机构造 成不可挽回的损失.本文主要研究双足步行机器人 图2侧向关节转角轨迹 ZMP(零力矩点)轨迹跟踪模糊控制 Fig.2 Lateral joint motion curve 1双足步行机器人稳定性分析 2双足步行机器人模糊控制 ZMP(零力矩点)越靠近支撑域的中心,机器人 2.1模糊控制系统设计 机器人的控制问题就是要使机器人的末端执行 的动态稳定性越好,当ZMP与支撑域中心重合,机 器人步行稳定裕度最大,抗颠覆能力最强.△MP位 器能够按照给定的轨迹、速度、加速度运动.根据运 置可以通过控制关节力矩的方法进行间接控制,因 动学方程的求解方法和速度、加速度分析方法,利用 为支撑腿踝关节是机器人中离支撑面最近的可控关 上位计算机的计算,可以将末端执行器的运动分解 节,对ZMP的影响最大,可以通过控制踝关节转动 为各个关节的运动.这样机器人的控制问题就变成 角度来调节ZMP的位置,以保证机器人行走的稳定 使机器人的各关节按照上位机分解的各关节期望轨 性56) 迹、速度、加速度来运行).双足步行机器人左踝侧 踝关节的前后摆动能够调节ZMP在前向(Y方 向关节控制系统的结构如图3所示。 e 向)的位置,踝关节的左右摆动能够调节ZMP在侧 k.E 模糊 幻保侧向关司 向(X方向)的位置,如图1所示.由于机器人重心 控制器 在前向上不存在脱离稳定区域的问题,只在横向上 有可能脱离稳定区域,所以这里只对侧向X向进行 图3踝侧向关节模糊控制系统 分析 Fig.3 Lateral joint fuzzy control system 双足步行机器人在动态步行时,零力矩点ZMP