正在加载图片...
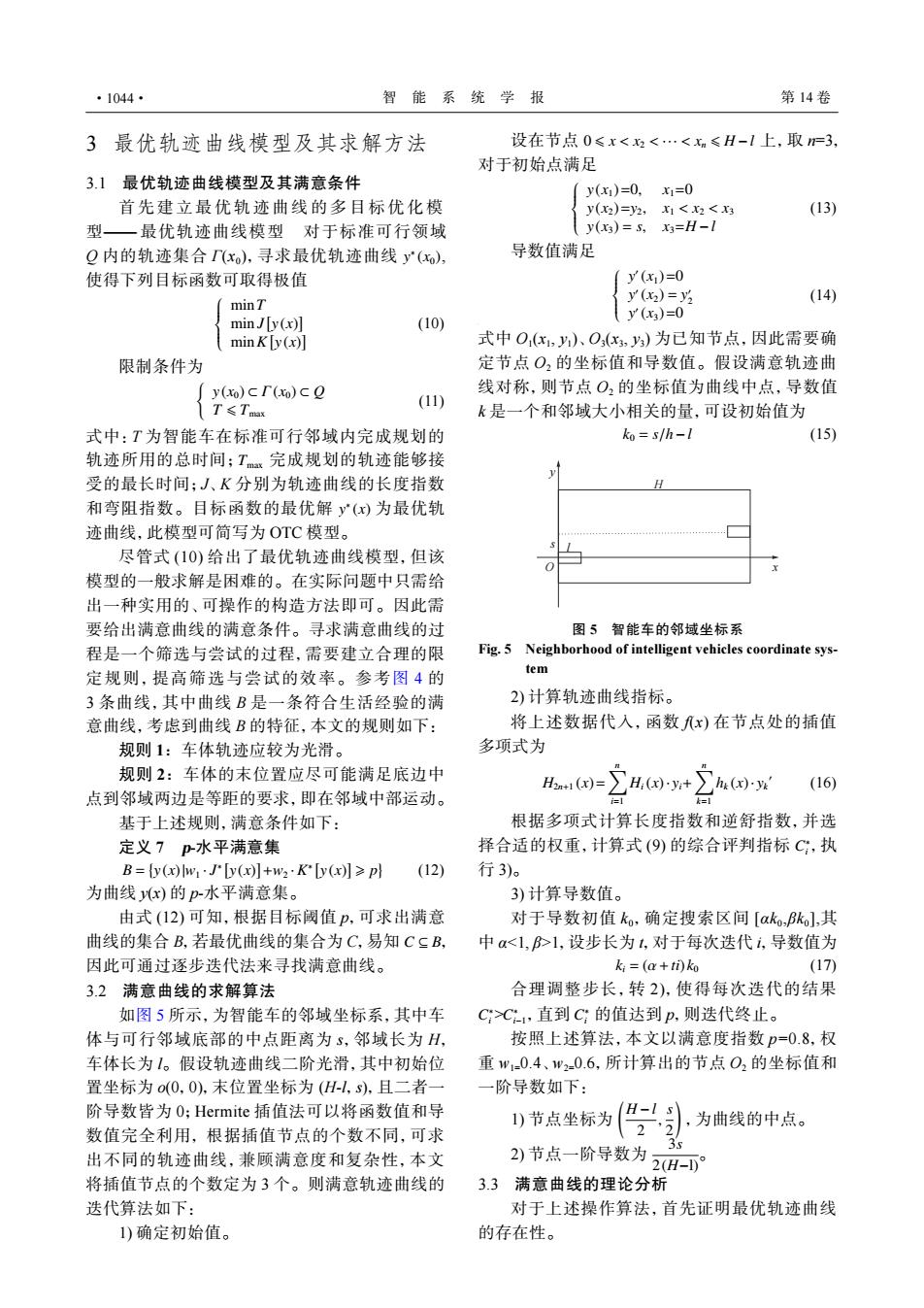
·1044· 智能系统学报 第14卷 3最优轨迹曲线模型及其求解方法 设在节点0≤x<2<…<xn≤H-1上,取=3, 对于初始点满足 3.1最优轨迹曲线模型及其满意条件 y(x1)=0, 1=0 首先建立最优轨迹曲线的多目标优化模 y()=2,<<3 (13) 型一最优轨迹曲线模型对于标准可行领域 y(x3)=S,x3=H-1 Q内的轨迹集合T(xo),寻求最优轨迹曲线y(xo), 导数值满足 使得下列目标函数可取得极值 y(x1)=0 minT y(2)=y3 (14) minJy(x) (10) y(x3)=0 minK [y(x)] 式中O(x,y)、O(x,)为已知节点,因此需要确 限制条件为 定节点O2的坐标值和导数值。假设满意轨迹曲 y(xo)cr(xo)cQ 线对称,则节点O2的坐标值为曲线中点,导数值 T≤Tax (11) k是一个和邻域大小相关的量,可设初始值为 式中:T为智能车在标准可行邻域内完成规划的 ko=s/h-I (15) 轨迹所用的总时间;Tmx完成规划的轨迹能够接 受的最长时间;J、K分别为轨迹曲线的长度指数 和弯阻指数。目标函数的最优解y()为最优轨 迹曲线,此模型可简写为OTC模型。 尽管式(10)给出了最优轨迹曲线模型,但该 模型的一般求解是困难的。在实际问题中只需给 出一种实用的、可操作的构造方法即可。因此需 要给出满意曲线的满意条件。寻求满意曲线的过 图5智能车的邻域坐标系 程是一个筛选与尝试的过程,需要建立合理的限 Fig.5 Neighborhood of intelligent vehicles coordinate sys- 定规则,提高筛选与尝试的效率。参考图4的 tem 3条曲线,其中曲线B是一条符合生活经验的满 2)计算轨迹曲线指标。 意曲线,考虑到曲线B的特征,本文的规则如下: 将上述数据代入,函数x)在节点处的插值 规则1:车体轨迹应较为光滑。 多项式为 规则2:车体的末位置应尽可能满足底边中 (16) 点到邻域两边是等距的要求,即在邻域中部运动。 基于上述规则,满意条件如下: 根据多项式计算长度指数和逆舒指数,并选 定义7p水平满意集 择合适的权重,计算式(9)的综合评判指标C:,执 B={y(x)hw·Jy(x]+w2Ky(x≥pl (12) 行3)0 为曲线x)的p-水平满意集。 3)计算导数值。 由式(12)可知,根据目标阈值p,可求出满意 对于导数初值ko,确定搜索区间[ak,Bkl,其 曲线的集合B,若最优曲线的集合为C,易知CsB, 中a<1,B>l,设步长为1,对于每次迭代i,导数值为 因此可通过逐步迭代法来寻找满意曲线。 ki=(a+ti)ko (17) 3.2满意曲线的求解算法 合理调整步长,转2),使得每次迭代的结果 如图5所示,为智能车的邻域坐标系,其中车 C:>C,直到C:的值达到p,则迭代终止。 体与可行邻域底部的中点距离为S,邻域长为H, 按照上述算法,本文以满意度指数p=0.8,权 车体长为1。假设轨迹曲线二阶光滑,其中初始位 重w1-0.4、1w2-0.6,所计算出的节点O2的坐标值和 置坐标为o(0,0),末位置坐标为(H-1,s),且二者一 一阶导数如下: 阶导数皆为O;Hermite插值法可以将函数值和导 1)节点坐标为 H-I s 2,2 为曲线的中点。 数值完全利用,根据插值节点的个数不同,可求 出不同的轨迹曲线,兼顾满意度和复杂性,本文 2)节点一阶导数为2H- 将插值节点的个数定为3个。则满意轨迹曲线的 3.3满意曲线的理论分析 迭代算法如下: 对于上述操作算法,首先证明最优轨迹曲线 1)确定初始值。 的存在性。3 最优轨迹曲线模型及其求解方法 3.1 最优轨迹曲线模型及其满意条件 y ∗ (x0) 首先建立最优轨迹曲线的多目标优化模 型—最优轨迹曲线模型 对于标准可行领域 Q 内的轨迹集合 Γ(x0 ),寻求最优轨迹曲线 , 使得下列目标函数可取得极值 minT min J [ y (x) ] minK [ y (x) ] (10) 限制条件为 { y (x0) ⊂ Γ(x0) ⊂ Q T ⩽ Tmax (11) Tmax y ∗ (x) 式中:T 为智能车在标准可行邻域内完成规划的 轨迹所用的总时间; 完成规划的轨迹能够接 受的最长时间;J、K 分别为轨迹曲线的长度指数 和弯阻指数。目标函数的最优解 为最优轨 迹曲线,此模型可简写为 OTC 模型。 尽管式 (10) 给出了最优轨迹曲线模型,但该 模型的一般求解是困难的。在实际问题中只需给 出一种实用的、可操作的构造方法即可。因此需 要给出满意曲线的满意条件。寻求满意曲线的过 程是一个筛选与尝试的过程,需要建立合理的限 定规则,提高筛选与尝试的效率。参考图 4 的 3 条曲线,其中曲线 B 是一条符合生活经验的满 意曲线,考虑到曲线 B 的特征,本文的规则如下: 规则 1:车体轨迹应较为光滑。 规则 2:车体的末位置应尽可能满足底边中 点到邻域两边是等距的要求,即在邻域中部运动。 基于上述规则,满意条件如下: 定义 7 p-水平满意集 B = { y (x)|w1 · J ∗ [ y (x) ] +w2 ·K ∗ [ y (x) ] ⩾ p } (12) 为曲线 y(x) 的 p-水平满意集。 C ⊆ B 由式 (12) 可知,根据目标阈值 p,可求出满意 曲线的集合 B,若最优曲线的集合为 C,易知 , 因此可通过逐步迭代法来寻找满意曲线。 3.2 满意曲线的求解算法 如图 5 所示,为智能车的邻域坐标系,其中车 体与可行邻域底部的中点距离为 s,邻域长为 H, 车体长为 l。假设轨迹曲线二阶光滑,其中初始位 置坐标为 o(0,0),末位置坐标为 (H-l,s),且二者一 阶导数皆为 0;Hermite 插值法可以将函数值和导 数值完全利用, 根据插值节点的个数不同,可求 出不同的轨迹曲线,兼顾满意度和复杂性,本文 将插值节点的个数定为 3 个。则满意轨迹曲线的 迭代算法如下: 1) 确定初始值。 设在节点 0 ⩽ x < x2 < ··· < xn ⩽ H −l 上,取 n=3, 对于初始点满足 y (x1)=0, x1=0 y (x2)=y2, x1 < x2 < x3 y (x3) = s, x3=H −l (13) 导数值满足 y ′ (x1)=0 y ′ (x2) = y ′ 2 y ′ (x3)=0 (14) 式中 O1 (x1 , y1 )、O3 (x3 , y3 ) 为已知节点,因此需要确 定节点 O2 的坐标值和导数值。假设满意轨迹曲 线对称,则节点 O2 的坐标值为曲线中点,导数值 k 是一个和邻域大小相关的量,可设初始值为 k0 = s/h−l (15) O x y H s l 图 5 智能车的邻域坐标系 Fig. 5 Neighborhood of intelligent vehicles coordinate system 2) 计算轨迹曲线指标。 将上述数据代入,函数 f(x) 在节点处的插值 多项式为 H2n+1 (x)= ∑n i=1 Hi(x)· yi+ ∑n k=1 hk (x)· yk ′ (16) C ∗ i 根据多项式计算长度指数和逆舒指数,并选 择合适的权重,计算式 (9) 的综合评判指标 ,执 行 3)。 3) 计算导数值。 对于导数初值 k0,确定搜索区间 [αk0 ,βk0 ],其 中 α<1, β>1,设步长为 t,对于每次迭代 i,导数值为 ki = (α+ti) k0 (17) C ∗ i C ∗ i−1 C ∗ i 合理调整步长,转 2),使得每次迭代的结果 > ,直到 的值达到 p,则迭代终止。 按照上述算法,本文以满意度指数 p=0.8,权 重 w1=0.4、w2=0.6,所计算出的节点 O2 的坐标值和 一阶导数如下: ( H −l 2 , s 2 ) 1) 节点坐标为 ,为曲线的中点。 3s 2(H−l) 2) 节点一阶导数为 。 3.3 满意曲线的理论分析 对于上述操作算法,首先证明最优轨迹曲线 的存在性。 ·1044· 智 能 系 统 学 报 第 14 卷