正在加载图片...
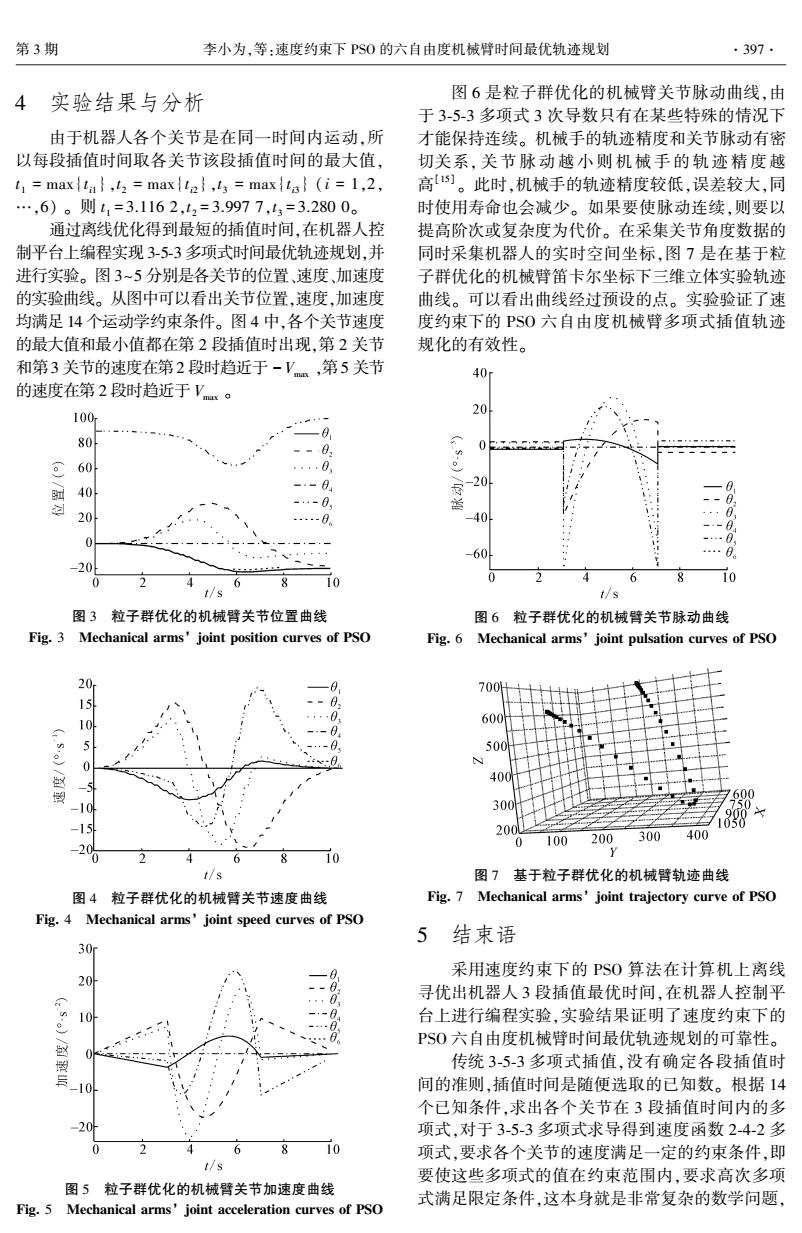
第3期 李小为,等:速度约束下PS0的六自由度机械臂时间最优轨迹规划 ·397. 实验结果与分析 图6是粒子群优化的机械臂关节脉动曲线,由 于3-5-3多项式3次导数只有在某些特殊的情况下 由于机器人各个关节是在同一时间内运动,所 才能保持连续。机械手的轨迹精度和关节脉动有密 以每段插值时间取各关节该段插值时间的最大值, 切关系,关节脉动越小则机械手的轨迹精度越 t=maxta,=maxt,t max (i=1,2, 高。此时,机械手的轨迹精度较低,误差较大,同 …,6)。则t1=3.1162,t2=3.9977,13=3.2800。 时使用寿命也会减少。如果要使脉动连续,则要以 通过离线优化得到最短的插值时间,在机器人控 提高阶次或复杂度为代价。在采集关节角度数据的 制平台上编程实现3-5-3多项式时间最优轨迹规划,并 同时采集机器人的实时空间坐标,图7是在基于粒 进行实验。图3~5分别是各关节的位置、速度、加速度 子群优化的机械臂笛卡尔坐标下三维立体实验轨迹 的实验曲线。从图中可以看出关节位置,速度,加速度 曲线。可以看出曲线经过预设的点。实验验证了速 均满足14个运动学约束条件。图4中,各个关节速度 度约束下的PS0六自由度机械臂多项式插值轨迹 的最大值和最小值都在第2段插值时出现,第2关节 规化的有效性。 和第3关节的速度在第2段时趋近于-V,第5关节 40 的速度在第2段时趋近于V。 20 100 -0 80 --0 03 60 ..·…03 20 40 --0 过 -…-0 20 -0 40 --0 0 -…0 60 -20, 6 8 10 6 10 t/s t/s 图3粒子群优化的机械臂关节位置曲线 图6粒子群优化的机械臂关节脉动曲线 Fig.3 Mechanical arms'joint position curves of PSO Fig.6 Mechanical arms'joint pulsation curves of PSO 20- 700H 15 ! …0 600 -- -…-0 500 0 N 400 -5 600 10 300 15 200 1050 100 200 300 400 -2 0 0 6 10 t/s 图7基于粒子群优化的机械臂轨迹曲线 图4粒子群优化的机械臂关节速度曲线 Fig.7 Mechanical arms'joint trajectory curve of PSO Fig.4 Mechanical arms'joint speed curves of PSO 5结束语 30 采用速度约束下的PS0算法在计算机上离线 20 --6 寻优出机器人3段插值最优时间,在机器人控制平 6。) 10 --0 台上进行编程实验,实验结果证明了速度约束下的 -…0 PS0六自由度机械臂时间最优轨迹规划的可靠性。 岗 传统3-5-3多项式插值,没有确定各段插值时 -10 间的准则,插值时间是随便选取的已知数。根据14 个已知条件,求出各个关节在3段插值时间内的多 -20 项式,对于3-5-3多项式求导得到速度函数2-4-2多 10 项式,要求各个关节的速度满足一定的约束条件,即 t/s 要使这些多项式的值在约束范围内,要求高次多项 图5粒子群优化的机械臂关节加速度曲线 式满足限定条件,这本身就是非常复杂的数学问题, Fig.5 Mechanical arms'joint acceleration curves of PSO4 实验结果与分析 由于机器人各个关节是在同一时间内运动,所 以每段插值时间取各关节该段插值时间的最大值, t 1 = max{t i1 },t 2 = max{t i2 },t 3 = max{t i3 } (i = 1,2, …,6) 。 则 t 1 = 3.116 2,t 2 = 3.997 7,t 3 = 3.280 0。 通过离线优化得到最短的插值时间,在机器人控 制平台上编程实现 3⁃5⁃3 多项式时间最优轨迹规划,并 进行实验。 图 3~5 分别是各关节的位置、速度、加速度 的实验曲线。 从图中可以看出关节位置,速度,加速度 均满足 14 个运动学约束条件。 图 4 中,各个关节速度 的最大值和最小值都在第 2 段插值时出现,第 2 关节 和第3 关节的速度在第2 段时趋近于 - Vmax ,第5 关节 的速度在第 2 段时趋近于 Vmax 。 图 3 粒子群优化的机械臂关节位置曲线 Fig. 3 Mechanical arms’ joint position curves of PSO 图 4 粒子群优化的机械臂关节速度曲线 Fig. 4 Mechanical arms’ joint speed curves of PSO 图 5 粒子群优化的机械臂关节加速度曲线 Fig. 5 Mechanical arms’ joint acceleration curves of PSO 图 6 是粒子群优化的机械臂关节脉动曲线,由 于 3⁃5⁃3 多项式 3 次导数只有在某些特殊的情况下 才能保持连续。 机械手的轨迹精度和关节脉动有密 切关系, 关 节 脉 动 越 小 则 机 械 手 的 轨 迹 精 度 越 高[15] 。 此时,机械手的轨迹精度较低,误差较大,同 时使用寿命也会减少。 如果要使脉动连续,则要以 提高阶次或复杂度为代价。 在采集关节角度数据的 同时采集机器人的实时空间坐标,图 7 是在基于粒 子群优化的机械臂笛卡尔坐标下三维立体实验轨迹 曲线。 可以看出曲线经过预设的点。 实验验证了速 度约束下的 PSO 六自由度机械臂多项式插值轨迹 规化的有效性。 图 6 粒子群优化的机械臂关节脉动曲线 Fig. 6 Mechanical arms’ joint pulsation curves of PSO 图 7 基于粒子群优化的机械臂轨迹曲线 Fig. 7 Mechanical arms’ joint trajectory curve of PSO 5 结束语 采用速度约束下的 PSO 算法在计算机上离线 寻优出机器人 3 段插值最优时间,在机器人控制平 台上进行编程实验,实验结果证明了速度约束下的 PSO 六自由度机械臂时间最优轨迹规划的可靠性。 传统 3⁃5⁃3 多项式插值,没有确定各段插值时 间的准则,插值时间是随便选取的已知数。 根据 14 个已知条件,求出各个关节在 3 段插值时间内的多 项式,对于 3⁃5⁃3 多项式求导得到速度函数 2⁃4⁃2 多 项式,要求各个关节的速度满足一定的约束条件,即 要使这些多项式的值在约束范围内,要求高次多项 式满足限定条件,这本身就是非常复杂的数学问题, 第 3 期 李小为,等:速度约束下 PSO 的六自由度机械臂时间最优轨迹规划 ·397·