正在加载图片...
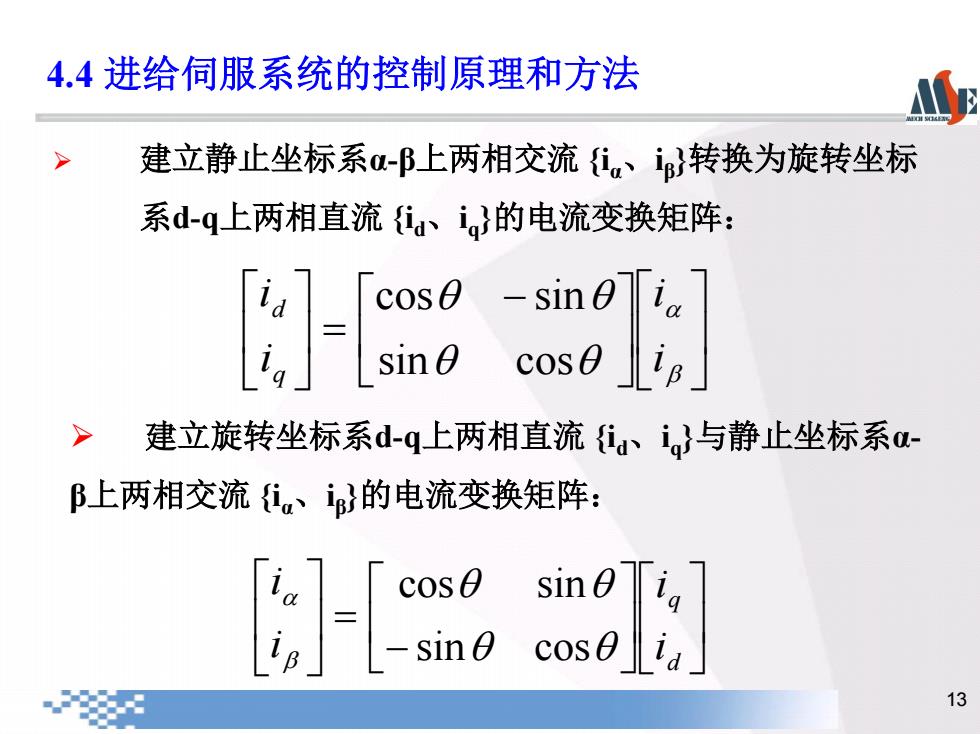
4.4进给伺服系统的控制原理和方法 建立静止坐标系m-邛上两相交流{i。、i书}转换为旋转坐标 系d-q上两湘直流{ia、}的电流变换矩阵: cose- > 建立旋转坐标系d-q上两相直流{、}与静止坐标系a B上两相交流{。、i书的电流变换矩阵: ia cos0 sit sin0 cos0 1313 建立静止坐标系α-β上两相交流 {iα、iβ}转换为旋转坐标 系d-q上两相直流 {id、iq}的电流变换矩阵: i i i i q d sin cos cos sin d q i i i i sin cos cos sin 建立旋转坐标系d-q上两相直流 {id、iq}与静止坐标系α- β上两相交流 {iα、iβ}的电流变换矩阵: 4.4 进给伺服系统的控制原理和方法