正在加载图片...
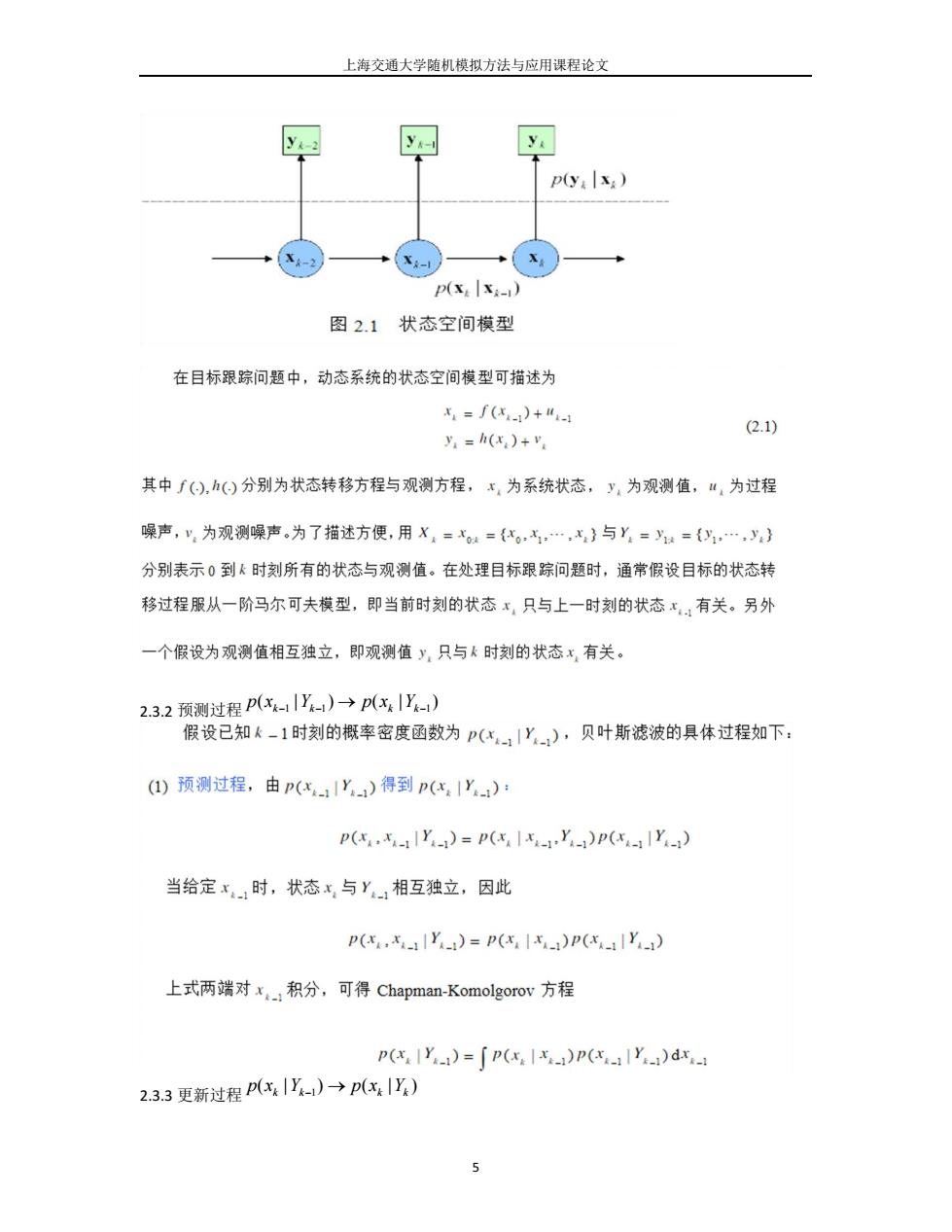
上海交通大学随机模拟方法与应用课程论文 p(yx:) 2 p(xx:-1) 图2.1状态空间模型 在目标跟踪问题中,动态系统的状态空间模型可描述为 x,=f(x-)+“-1 (2.1) =h()+v 其中∫(),()分别为状态转移方程与观测方程,x,为系统状态,y,为观测值,“,为过程 噪声,y,为观测噪声,为了描述方便,用X,=x1=代。,…,x}与Y=八u={,,》} 分别表示0到k时刻所有的状态与观测值。在处理目标跟踪问题时,通常假设目标的状态转 移过程服从一阶马尔可夫模型,即当前时刻的状态x,只与上一时刻的状态x,有关。另外 一个假设为观测值相互独立,即观测值y,只与k时刻的状态x,有关。 2.32预测过程p(x-Y)→p(xY-) 假设已知k-1时刻的概率密度函数为p(x-11Y-),贝叶斯滤波的具体过程如下: (1)预测过程,由p(x-1IY-)得到p(x1Y-) P(x,x-1Y-)=p(x|x-1Y-)P(x-1IY-) 当给定x,时,状态x与Y-相互独立,因此 p(x,x1lY)=p(1-)p(-Y-) 上式两端对x-,积分,可得Chapman-Komolgorov方程 p(x)=[p(xx)p(xY)dx 2.33更新过程px|Y-)→p(xY) 5上海交通大学随机模拟方法与应用课程论文 5 2.3.2 预测过程 1 1 1 ( | ) ( | ) k k k k p x Y p x Y 2.3.3 更新过程 1 ( | ) ( | ) k k k k p x Y p x Y