正在加载图片...
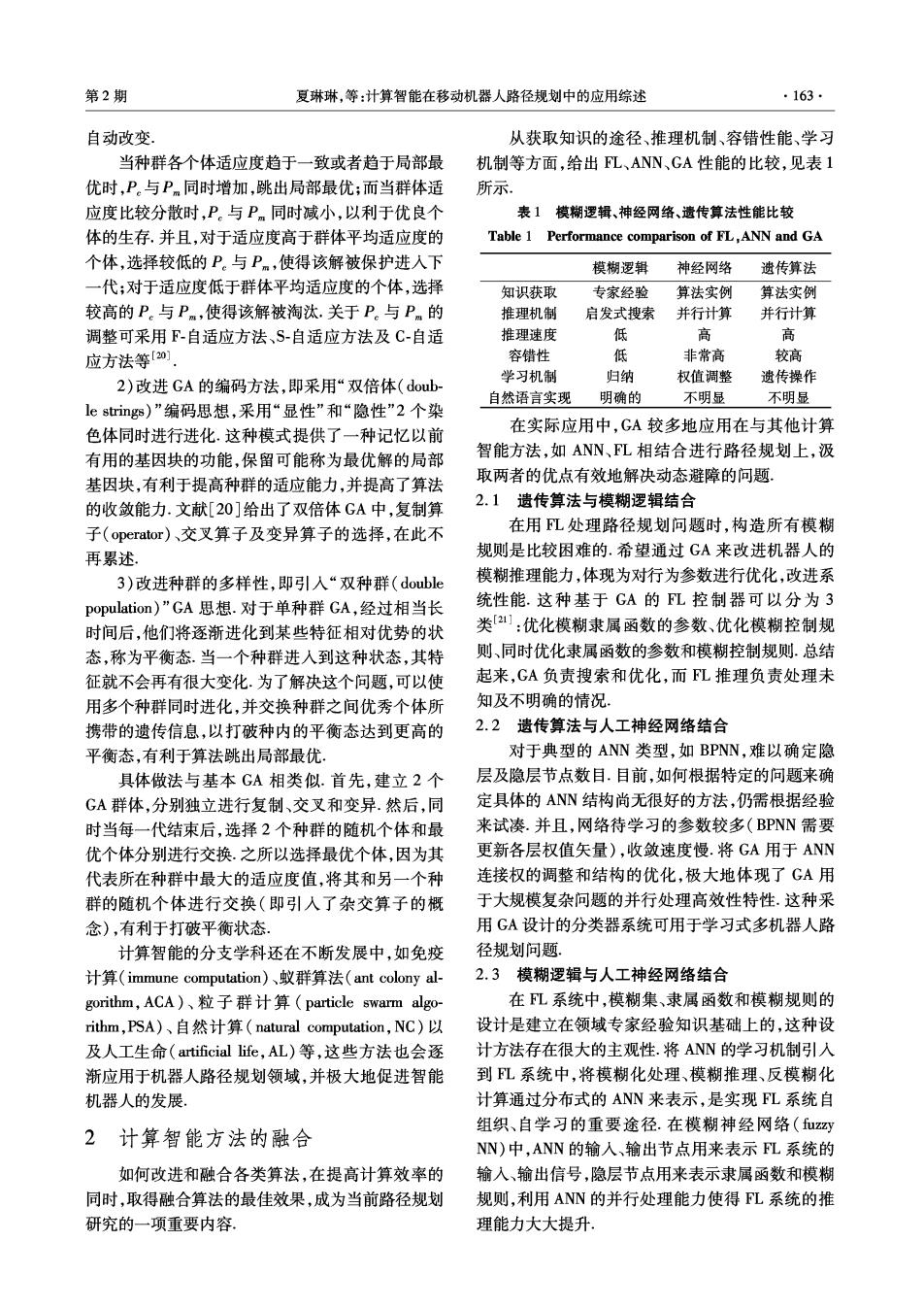
第2期 夏琳琳,等:计算智能在移动机器人路径规划中的应用综述 ·163 自动改变 从获取知识的途径、推理机制、容错性能、学习 当种群各个体适应度趋于一致或者趋于局部最 机制等方面,给出FL、ANN、GA性能的比较,见表1 优时,P。与Pm同时增加,跳出局部最优;而当群体适 所示 应度比较分散时,P。与Pm同时减小,以利于优良个 表1模糊逻辑、神经网络、遗传算法性能比较 体的生存.并且,对于适应度高于群体平均适应度的 Table 1 Performance comparison of FL,ANN and GA 个体,选择较低的P。与Pm,使得该解被保护进入下 模糊逻辑 神经网络 遗传算法 一代;对于适应度低于群体平均适应度的个体,选择 知识获取 专家经验 算法实例 算法实例 较高的P。与Pm,使得该解被淘汰.关于P。与Pm的 推理机制 启发式搜索 并行计算 并行计算 调整可采用F-自适应方法、S-自适应方法及C-自适 推理速度 低 高 高 应方法等[20] 容错性 非常高 较高 学习机制 权值调整 遗传操作 2)改进GA的编码方法,即采用“双倍体(doub 归纳 自然语言实现 明确的 不明显 不明显 le strings)”编码思想,采用“显性”和“隐性”2个染 色体同时进行进化.这种模式提供了一种记忆以前 在实际应用中,GA较多地应用在与其他计算 有用的基因块的功能,保留可能称为最优解的局部 智能方法,如ANN、FL相结合进行路径规划上,汲 基因块,有利于提高种群的适应能力,并提高了算法 取两者的优点有效地解决动态避障的问题, 的收敛能力.文献[20]给出了双倍体GA中,复制算 2.1遗传算法与模糊逻辑结合 子(operator)、交叉算子及变异算子的选择,在此不 在用L处理路径规划问题时,构造所有模糊 再累述 规则是比较困难的.希望通过GA来改进机器人的 3)改进种群的多样性,即引入“双种群(double 模糊推理能力,体现为对行为参数进行优化,改进系 population)”GA思想.对于单种群GA,经过相当长 统性能.这种基于GA的L控制器可以分为3 时间后,他们将逐渐进化到某些特征相对优势的状 类21:优化模糊隶属函数的参数、优化模糊控制规 态,称为平衡态.当一个种群进人到这种状态,其特 则、同时优化隶属函数的参数和模糊控制规则.总结 征就不会再有很大变化.为了解决这个问题,可以使 起来,GA负责搜索和优化,而FL推理负责处理未 用多个种群同时进化,并交换种群之间优秀个体所 知及不明确的情况, 携带的遗传信息,以打破种内的平衡态达到更高的 2.2遗传算法与人工神经网络结合 平衡态,有利于算法跳出局部最优。 对于典型的ANN类型,如BPNN,难以确定隐 具体做法与基本GA相类似.首先,建立2个 层及隐层节点数目.目前,如何根据特定的问题来确 GA群体,分别独立进行复制、交叉和变异.然后,同 定具体的ANN结构尚无很好的方法,仍需根据经验 时当每一代结束后,选择2个种群的随机个体和最 来试凑.并且,网络待学习的参数较多(BPNN需要 优个体分别进行交换.之所以选择最优个体,因为其 更新各层权值矢量),收敛速度慢.将GA用于ANN 代表所在种群中最大的适应度值,将其和另一个种 连接权的调整和结构的优化,极大地体现了GA用 群的随机个体进行交换(即引人了杂交算子的概 于大规模复杂问题的并行处理高效性特性.这种采 念),有利于打破平衡状态, 用GA设计的分类器系统可用于学习式多机器人路 计算智能的分支学科还在不断发展中,如免疫 径规划问题, 计算(immune computation)、蚁群算法(ant colony al- 2.3模糊逻辑与人工神经网络结合 gorithm,ACA)、粒子群计算(particle swarm algo- 在L系统中,模糊集、隶属函数和模糊规则的 rithm,PSA)、自然计算(natural computation,NC)以 设计是建立在领域专家经验知识基础上的,这种设 及人工生命(artificial life.,AL)等,这些方法也会逐 计方法存在很大的主观性.将ANN的学习机制引入 渐应用于机器人路径规划领域,并极大地促进智能 到L系统中,将模糊化处理、模糊椎理、反模糊化 机器人的发展 计算通过分布式的ANN来表示,是实现FL系统自 组织、自学习的重要途径.在模糊神经网络(uzy 2计算智能方法的融合 NN)中,ANN的输人、输出节点用来表示FL系统的 如何改进和融合各类算法,在提高计算效率的 输入、输出信号,隐层节点用来表示隶属函数和模糊 同时,取得融合算法的最佳效果,成为当前路径规划 规则,利用ANN的并行处理能力使得FL系统的推 研究的一项重要内容 理能力大大提升