正在加载图片...
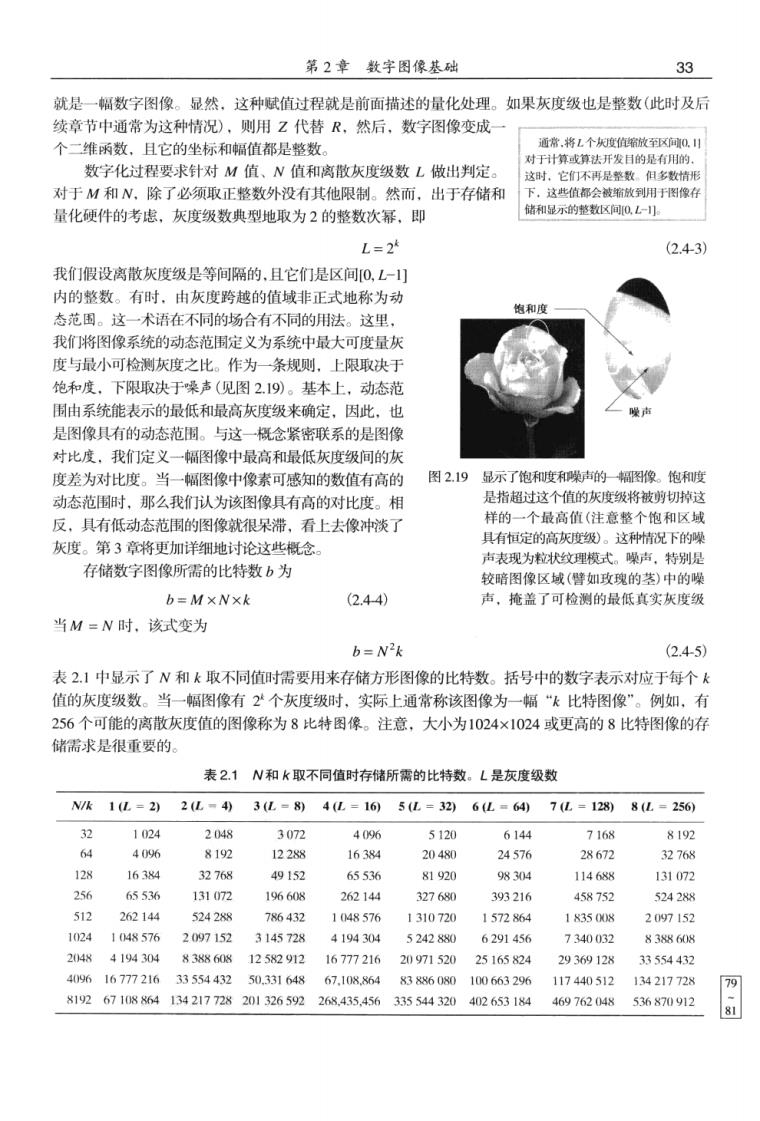
第2章数字图像基础 33 就是幅数字图像。显然,这种赋值过程就是前面描述的量化处理。如果灰度级也是整数(此时及后 续章节中通常为这种情况),则用Z代替R,然后,数字图像变成 个一维项数,目它的华标和幅值都是整数 意.将L个值缩放到区向0. 对于计算或算钛开发日的是有用的 数字化过程要求针对M值、N值和离散灰度级数L做出判定 这时它们不再是整数但多数情州 对于M和N,除了必须取正整数外没有其他限制。然而,出于存储和 图像 量化使件的考虑,灰度级数典型地取为2的整数次幂,即 储和显示的整数区间Q,L小 L=2 (2.43 我们假设离散灰度级是等间隔的.且它们是区间0,L-) 内的整数。有时,由灰度跨越的值域非正式地称为动 和电 态范围。这一术语在不同的场合有不同的用法。这里。 我将图像系统的动态范围定义为系统中最大可度量灰 度与最小可检测灰度之比。作为一条规则上限取决于 饱和度,下限取决于噪声(见图2.19)。基本上,动态范 围由系统能表示的最低和最高灰度级来确定,因此,也 是图像具有的动态范围。与这一一概念紧密联系的是图像 对比度,我们定义一幅图像中最高和最低灰度级间的灰 度差为对比度。当一幅图像中像素可感知的数值有高的 图2.19显示了饱和度和噪声的像。饱和 动态范围时,那么我们认为该图像具有高的对比度。相 是指相过这个值的灰度级将被剪切掉 反,具有低动态范围的图像就很呆滞,看上去像冲淡 样的 个最高值(注意整个饱和区域 灰度。第3章将更加详细地讨论这些概念 具有但定的高灰顶级)。这种竹情况下的 表现为拉状纹理模式。噪声,特别 存储数字图像所需的比特数b为 较暗图像区域(譬如玫瑰的茎)中的噪 b=MxNxk (2.44) 声,掩盖了可检测的最低真实灰度级 当M=N时,该式变为 b=N2k (2.45) 表21中品示了N和人取不同值时需要用来存储方形图像的比特数。括号中的数字表示对应于每个 值的灰度级数。当一幅图像有2个灰度级时,实际上通常称该图像为一幅“k比特图像”。例如,有 256个可能的离散灰度值的图像称为8比特图像。注意.大小为1024×1024或更高的8比特图像的: 储需求是很重要的。 表2.1N和k取不同值时存储所需的比特数。L是灰度级数 Wk1u=22亿-43亿=8)4u=165亿=36u=647亿=128)8u=250 1024 2048 3072 4096 5120 6144 7168 8192 406 8192 122X8 16384 20480 24576 28672 32768 1634 32768 40152 65536 X1U20 0w04 114688 131072 356 66526 131072 19660 262144 327680 303216 458752 5242 512 262144 5242N8 104857 131072 157286 183500 20715 102 1048576 2097152 314572 4194304 5242880 6291430 7340052 83560 24 419430483w860812582912167772162097152025165824 2936912X 33554432 4094167772163355443250.33164867.103,85483886080100663296117440512134217728 8192671084134217728201326592268435,456335544320402653184469762048536s70912 D-