正在加载图片...
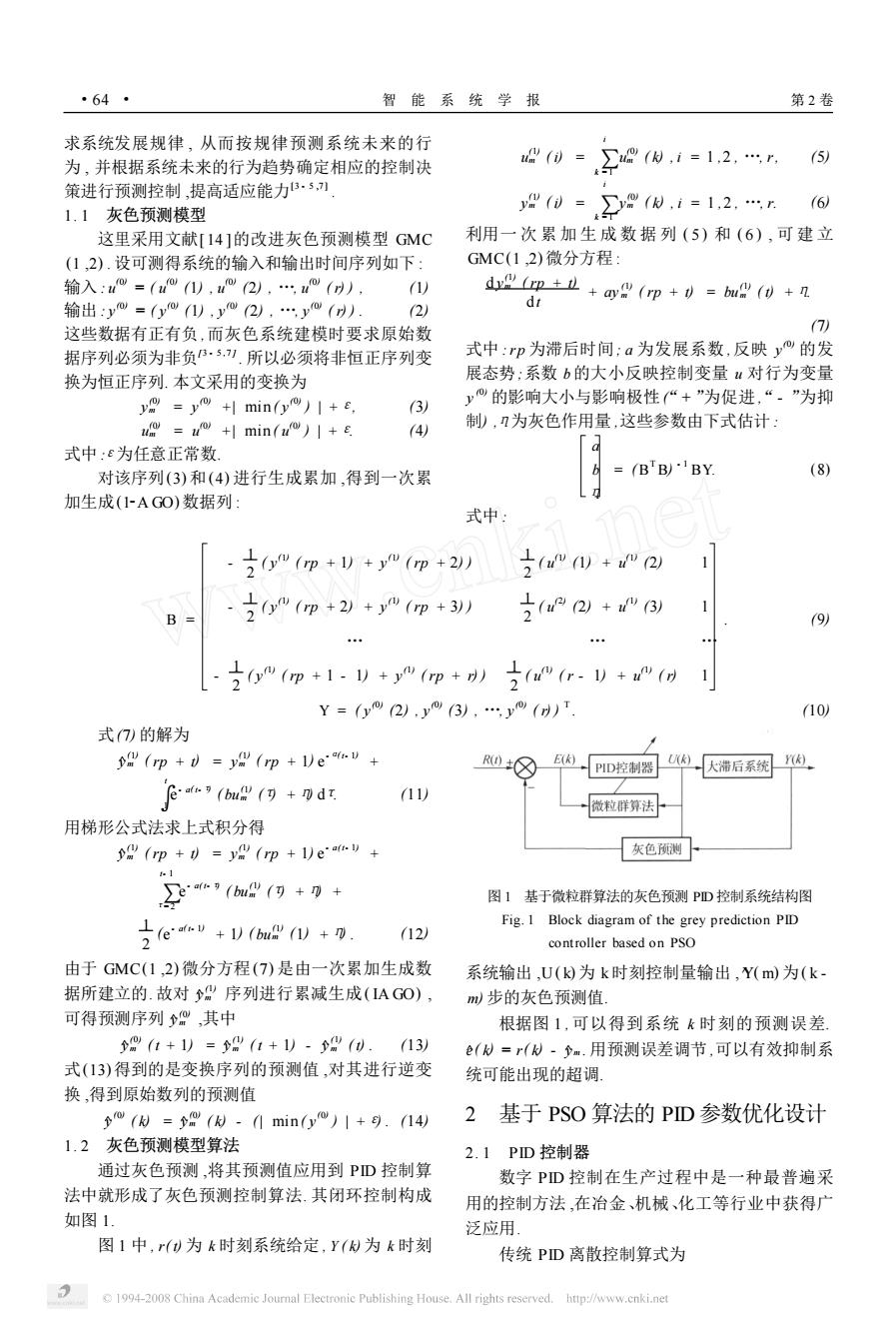
·64 智能系统学报 第2卷 求系统发展规律,从而按规律预测系统未来的行 为,并根据系统未来的行为趋势确定相应的控制决 (附,i=1,2,r, (5) &T 策进行预测控制,提高适应能力B5,刃 (6 1.1灰色预测模型 (0=∑0(形,i=1,2.r 这里采用文献[14]的改进灰色预测模型GMC 利用一次累加生成数据列(5)和(6),可建立 (1,2).设可测得系统的输入和输出时间序列如下: GMC(1,2)微分方程: 输入:0=(u0(1),0(2),0(), 1) dP+1+W(rp+)=b公(W+n 输出:y=(yo1),y0(2,…y@(). dt (2) 这些数据有正有负,而灰色系统建模时要求原始数 (7) 据序列必须为非负5,”.所以必须将非恒正序列变 式中:rp为滞后时间;a为发展系数,反映y的发 换为恒正序列.本文采用的变换为 展态势:系数b的大小反映控制变量“对行为变量 yg=y+川miny)l+e, 3) y的影响大小与影响极性“+”为促进,“。”为抑 =to+lmin(uo)|+£ (4) 制),1为灰色作用量,这些参数由下式估计: 式中:e为任意正常数, 对该序列(3)和(4)进行生成累加,得到一次累 (BTB)BY. (8) 加生成(1AGO)数据列 式中 "p+D+(m+2 3ww+"2 B= 2"(p+2)+ym(p+3) °+l (9) 0(m+1y+y"m+r-)+( Y=(y2),y(3),y()T (10) 式7)的解为 W(p+刊=yW(p+)e-w+ Rω E(k) PID控制器 U(k) 大滞后系统 (b (d 11 微粒群算法 用梯形公式法求上式积分得 (rp ya(rp )ea+ 灰色预测 e9(b)+ヮ+ 图1基于微粒群算法的灰色预测PD控制系统结构图 Fig.1 Block diagram of the grey prediction PID e (bu(1) (12 controller based on PSO 由于GMC(1,2)微分方程(7)是由一次累加生成数 系统输出,U(k为k时刻控制量输出,Y(m)为(k 据所建立的.故对序列进行累减生成(IAGO), m步的灰色预测值 可得预测序列,其中 根据图1,可以得到系统k时刻的预测误差 0(t+1)=g(1+1)-(.13) e(W=r(W-少m.用预测误差调节,可以有效抑制系 式(13)得到的是变换序列的预测值,对其进行逆变 统可能出现的超调 换,得到原始数列的预测值 (d=(d-0min(y)1+9.14 2 基于PSO算法的PD参数优化设计 1.2灰色预测模型算法 2.1PD控制器 通过灰色预测,将其预测值应用到PD控制算 数字PD控制在生产过程中是一种最普遍采 法中就形成了灰色预测控制算法.其闭环控制构成 用的控制方法,在治金、机械、化工等行业中获得广 如图1。 泛应用 图1中,r()为k时刻系统给定,Y(付为k时刻 传统PD离散控制算式为 1994-2008 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net求系统发展规律 , 从而按规律预测系统未来的行 为 , 并根据系统未来的行为趋势确定相应的控制决 策进行预测控制 ,提高适应能力[3 - 5 ,7 ] . 1. 1 灰色预测模型 这里采用文献[ 14 ]的改进灰色预测模型 GMC (1 ,2) . 设可测得系统的输入和输出时间序列如下 : 输入 : u (0) = ( u (0) (1) , u (0) (2) , …, u (0) ( r) ) , (1) 输出 : y (0) = ( y (0) (1) , y (0) (2) , …, y (0) ( r) ) . (2) 这些数据有正有负 ,而灰色系统建模时要求原始数 据序列必须为非负[3 - 5 ,7 ] . 所以必须将非恒正序列变 换为恒正序列. 本文采用的变换为 y (0) m = y (0) +| min ( y (0) ) | +ε, (3) u (0) m = u (0) +| min ( u (0) ) | +ε. (4) 式中 :ε为任意正常数. 对该序列(3) 和(4) 进行生成累加 ,得到一次累 加生成(12A GO) 数据列 : u (1) m ( i) = ∑ i k = 1 u (0) m ( k) , i = 1 ,2 , …, r, (5) y (1) m ( i) = ∑ i k = 1 y (0) m ( k) , i = 1 ,2 , …, r. (6) 利用一 次 累 加 生 成 数 据 列 ( 5 ) 和 ( 6 ) , 可 建 立 GMC(1 ,2) 微分方程 : d y (1) m ( rp + t) dt + ay (1) m ( rp + t) = bu (1) m ( t) +η. (7) 式中 :rp 为滞后时间; a 为发展系数 ,反映 y (0) 的发 展态势;系数 b的大小反映控制变量 u 对行为变量 y (0) 的影响大小与影响极性“( + ”为促进“, - ”为抑 制) ,η为灰色作用量 ,这些参数由下式估计 : a b η = (B T B) - 1 BY. (8) 式中 : B = - 1 2 ( y (1) ( rp + 1) + y (1) ( rp + 2) ) 1 2 ( u (1) (1) + u (1) (2) 1 - 1 2 ( y (1) ( rp + 2) + y (1) ( rp + 3) ) 1 2 ( u (2) (2) + u (1) (3) 1 … … … - 1 2 ( y (1) ( rp + 1 - 1) + y (1) ( rp + r) ) 1 2 ( u (1) ( r - 1) + u (1) ( r) 1 . (9) Y = ( y (0) (2) , y (0) (3) , …, y (0) ( r) ) T . (10) 式(7) 的解为 ^y (1) m ( rp + t) = y (1) m ( rp + 1) e -α( t- 1) + ∫ t 1 e - a( t-τ) ( bu (1) m (τ) +η) dτ. (11) 用梯形公式法求上式积分得 ^y (1) m ( rp + t) = y (1) m ( rp + 1) e - a( t- 1) + ∑ t- 1 τ= 2 e - a( t-τ) ( bu (1) m (τ) +η) + 1 2 (e - a( t- 1) + 1) ( bu (1) m (1) +η) . (12) 由于 GMC(1 ,2) 微分方程 (7) 是由一次累加生成数 据所建立的. 故对 ^y (1) m 序列进行累减生成( IA GO) , 可得预测序列 ^y (0) m ,其中 ^y (0) m ( t + 1) = ^y (1) m ( t + 1) - ^y (1) m ( t) . (13) 式(13) 得到的是变换序列的预测值 ,对其进行逆变 换 ,得到原始数列的预测值 ^y (0) ( k) = ^y (0) m ( k) - (| min ( y (0) ) | +ε) . (14) 1. 2 灰色预测模型算法 通过灰色预测 ,将其预测值应用到 PID 控制算 法中就形成了灰色预测控制算法. 其闭环控制构成 如图 1. 图 1 中 , r( t) 为 k 时刻系统给定 , Y ( k) 为 k 时刻 图 1 基于微粒群算法的灰色预测 PID 控制系统结构图 Fig. 1 Block diagram of the grey prediction PID controller based on PSO 系统输出 ,U ( k) 为 k时刻控制量输出 , ^Y( m) 为( k - m) 步的灰色预测值. 根据图 1 , 可以得到系统 k 时刻的预测误差. ^e( k) = r( k) - ^y m . 用预测误差调节 ,可以有效抑制系 统可能出现的超调. 2 基于 PSO 算法的 PID 参数优化设计 2. 1 PID 控制器 数字 PID 控制在生产过程中是一种最普遍采 用的控制方法 ,在冶金、机械、化工等行业中获得广 泛应用. 传统 PID 离散控制算式为 · 46 · 智 能 系 统 学 报 第 2 卷