正在加载图片...
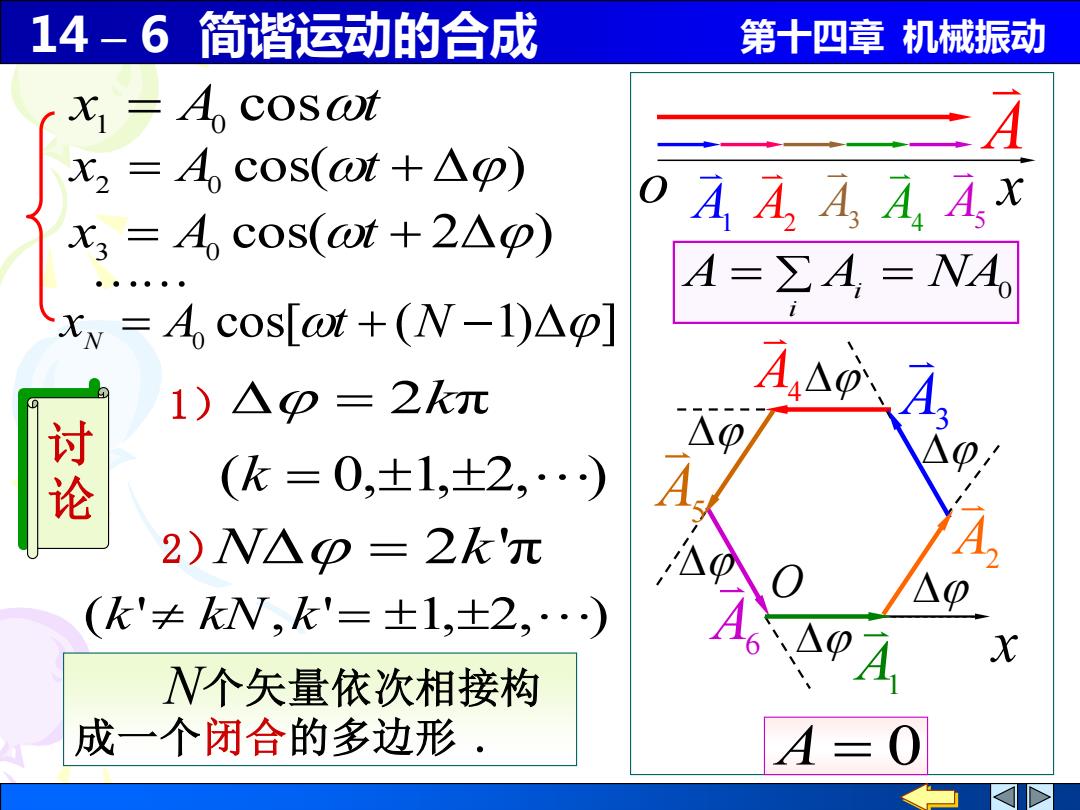
14-6简谐运动的合成 第十四章机械振动 X=A cosot A x2=Acos(ot+△p) x3=Acos(t+2△p) AAA A Ax A=A=NA, xy=4 cos[axt+(N-1)A] 1)△p=2元 Γ△0 论 (k=0,±1,±2,) 2)V△⑩=2k'元 (k'≠W,k'=±1,±2,) 、△0 W个矢量依次相接构 成一个闭合的多边形 A=0 14 – 6 简谐运动的合成 第十四章 机械振动 A1 A2 A3 A4 o x A5 A A NA0 i = i = A x A cost 1 = 0 cos( ) x2 = A0 t + cos[ ( 1) ] xN = A0 t + N − cos( 2 ) x3 = A0 t + A1 A2 A3 A4 x O A5 A6 A = 0 (k' kN,k' = 1,2, ) 2) N = 2k'π 1) = 2kπ (k = 0,1,2, ) 个矢量依次相接构 成一个闭合的多边形 . N 讨 论