正在加载图片...
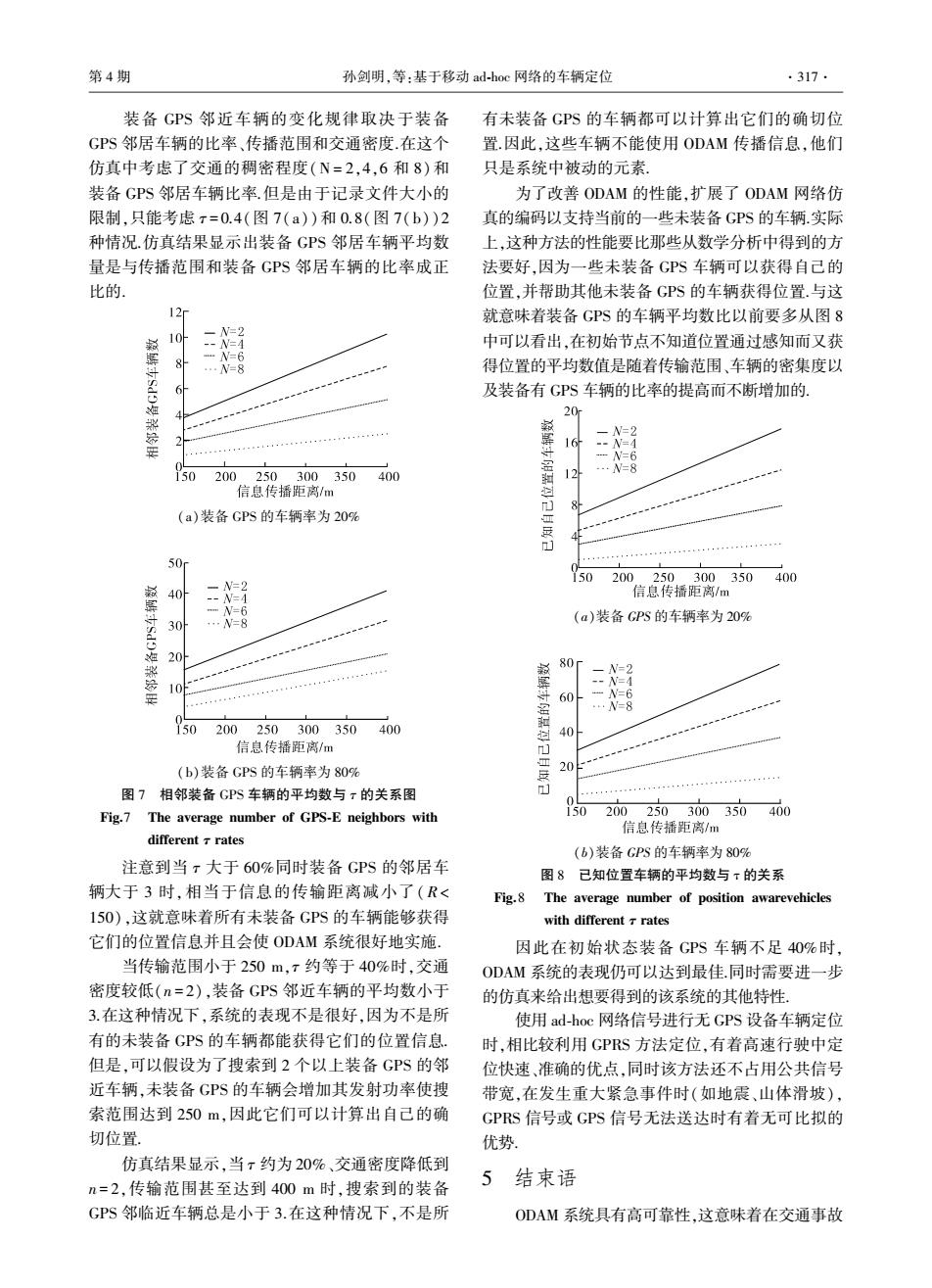
第4期 孙剑明,等:基于移动ad-hoc网络的车辆定位 ·317· 装备GPS邻近车辆的变化规律取决于装备 有未装备GPS的车辆都可以计算出它们的确切位 GPS邻居车辆的比率、传播范围和交通密度.在这个 置.因此,这些车辆不能使用ODAM传播信息,他们 仿真中考虑了交通的稠密程度(N=2,4,6和8)和 只是系统中被动的元素。 装备GPS邻居车辆比率但是由于记录文件大小的 为了改善ODAM的性能,扩展了ODAM网络仿 限制,只能考虑r=0.4(图7(a)和0.8(图7(b))2 真的编码以支持当前的一些未装备GPS的车辆实际 种情况.仿真结果显示出装备GPS邻居车辆平均数 上,这种方法的性能要比那些从数学分析中得到的方 量是与传播范围和装备GPS邻居车辆的比率成正 法要好,因为一些未装备GPS车辆可以获得自己的 比的 位置,并帮助其他未装备GPS的车辆获得位置.与这 就意味着装备GPS的车辆平均数比以前要多从图8 N= 中可以看出,在初始节点不知道位置通过感知而又获 W=6 8 …W=8 得位置的平均数值是随着传输范围、车辆的密集度以 及装备有GPS车辆的比率的提高而不断增加的. 20 N=6 .N=8 150 200250300350 400 信息传播距离/m (a)装备GPS的车辆率为209% 50 50 200250300350 400 40 信息传播距离/m y=书 (a)装备GPS的车辆率为20% 30 80m N=2 60 N=8 ǐ50 200250 300350 400 信息传播距离/m (b)装备GPS的车辆率为809% 30 图7相邻装备GPS车辆的平均数与T的关系图 器 Fig.7 The average number of GPS-E neighbors with 150 200250300350400 信息传播距离/m different r rates (b)装备GPS的车辆率为80% 注意到当?大于60%同时装备GPS的邻居车 图8已知位置车辆的平均数与,的关系 辆大于3时,相当于信息的传输距离减小了(R< Fig.8 The average number of position awarevehicles 150),这就意味着所有未装备GPS的车辆能够获得 with different r rates 它们的位置信息并且会使ODAM系统很好地实施. 因此在初始状态装备GPS车辆不足40%时, 当传输范围小于250m,T约等于40%时,交通 ODAM系统的表现仍可以达到最佳.同时需要进一步 密度较低(n=2),装备GPS邻近车辆的平均数小于 的仿真来给出想要得到的该系统的其他特性, 3.在这种情况下,系统的表现不是很好,因为不是所 使用ad-hoc网络信号进行无GPS设备车辆定位 有的未装备GPS的车辆都能获得它们的位置信息. 时,相比较利用GPRS方法定位,有着高速行驶中定 但是,可以假设为了搜索到2个以上装备GPS的邻 位快速、准确的优点,同时该方法还不占用公共信号 近车辆,未装备GPS的车辆会增加其发射功率使搜 带宽,在发生重大紧急事件时(如地震、山体滑坡), 索范围达到250m,因此它们可以计算出自己的确 GPRS信号或GPS信号无法送达时有着无可比拟的 切位置. 优势 仿真结果显示,当?约为20%、交通密度降低到 n=2,传输范围甚至达到400m时,搜索到的装备 5结束语 GP$邻临近车辆总是小于3.在这种情况下,不是所 ODAM系统具有高可靠性,这意味着在交通事故装备 GPS 邻近车辆的变化规律取决于装备 GPS 邻居车辆的比率、传播范围和交通密度.在这个 仿真中考虑了交通的稠密程度(N = 2,4,6 和 8)和 装备 GPS 邻居车辆比率.但是由于记录文件大小的 限制,只能考虑 τ = 0.4(图 7(a))和 0.8(图 7(b))2 种情况.仿真结果显示出装备 GPS 邻居车辆平均数 量是与传播范围和装备 GPS 邻居车辆的比率成正 比的. (a)装备 GPS 的车辆率为 20% (b)装备 GPS 的车辆率为 80% 图 7 相邻装备 GPS 车辆的平均数与 τ 的关系图 Fig.7 The average number of GPS⁃E neighbors with different τ rates 注意到当 τ 大于 60%同时装备 GPS 的邻居车 辆大于 3 时,相当于信息的传输距离减小了( R < 150),这就意味着所有未装备 GPS 的车辆能够获得 它们的位置信息并且会使 ODAM 系统很好地实施. 当传输范围小于 250 m,τ 约等于 40%时,交通 密度较低(n = 2),装备 GPS 邻近车辆的平均数小于 3.在这种情况下,系统的表现不是很好,因为不是所 有的未装备 GPS 的车辆都能获得它们的位置信息. 但是,可以假设为了搜索到 2 个以上装备 GPS 的邻 近车辆,未装备 GPS 的车辆会增加其发射功率使搜 索范围达到 250 m,因此它们可以计算出自己的确 切位置. 仿真结果显示,当 τ 约为 20%、交通密度降低到 n = 2,传输范围甚至达到 400 m 时,搜索到的装备 GPS 邻临近车辆总是小于 3.在这种情况下,不是所 有未装备 GPS 的车辆都可以计算出它们的确切位 置.因此,这些车辆不能使用 ODAM 传播信息,他们 只是系统中被动的元素. 为了改善 ODAM 的性能,扩展了 ODAM 网络仿 真的编码以支持当前的一些未装备 GPS 的车辆.实际 上,这种方法的性能要比那些从数学分析中得到的方 法要好,因为一些未装备 GPS 车辆可以获得自己的 位置,并帮助其他未装备 GPS 的车辆获得位置.与这 就意味着装备 GPS 的车辆平均数比以前要多从图 8 中可以看出,在初始节点不知道位置通过感知而又获 得位置的平均数值是随着传输范围、车辆的密集度以 及装备有 GPS 车辆的比率的提高而不断增加的. (a)装备 GPS 的车辆率为 20% (b)装备 GPS 的车辆率为 80% 图 8 已知位置车辆的平均数与 τ 的关系 Fig.8 The average number of position awarevehicles with different τ rates 因此在初始状态装备 GPS 车辆不足 40%时, ODAM 系统的表现仍可以达到最佳.同时需要进一步 的仿真来给出想要得到的该系统的其他特性. 使用 ad⁃hoc 网络信号进行无 GPS 设备车辆定位 时,相比较利用 GPRS 方法定位,有着高速行驶中定 位快速、准确的优点,同时该方法还不占用公共信号 带宽,在发生重大紧急事件时(如地震、山体滑坡), GPRS 信号或 GPS 信号无法送达时有着无可比拟的 优势. 5 结束语 ODAM 系统具有高可靠性,这意味着在交通事故 第 4 期 孙剑明,等:基于移动 ad⁃hoc 网络的车辆定位 ·317·