正在加载图片...
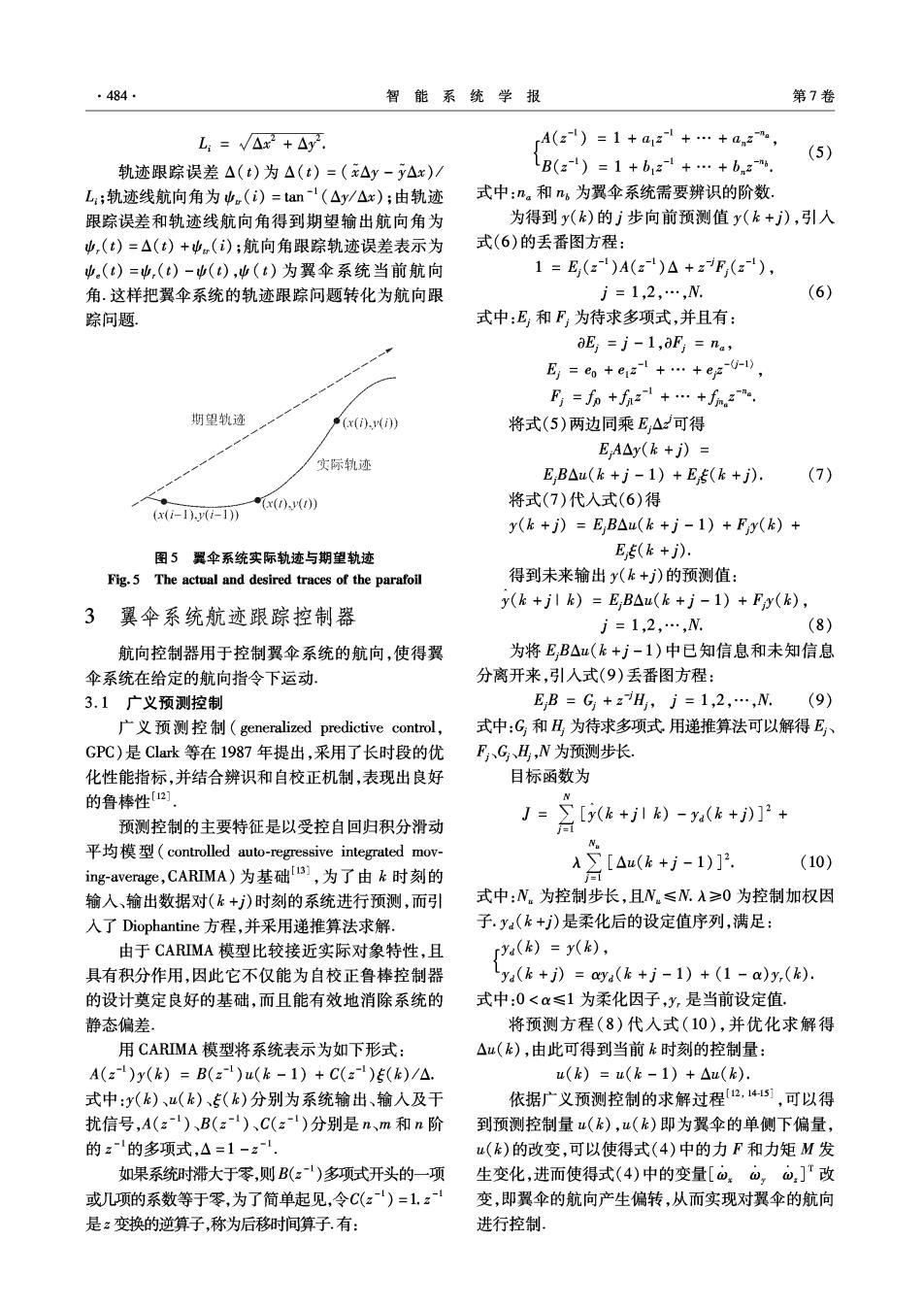
·484 智能系统学报 第7卷 L:=√△x+△y. A(z)=1+a1z1+…+anz, (5) 轨迹跟踪误差△(t)为△(t)=(x△y-y△x)/ B(z1)=1+b1z1+…+bn2 L:;轨迹线航向角为也.(i)=tan-1(△y/△x);由轨迹 式中:n.和ns为翼伞系统需要辨识的阶数, 跟踪误差和轨迹线航向角得到期望输出航向角为 为得到y(k)的j步向前预测值y(k+),引入 中,(t)=△(t)+中(i);航向角跟踪轨迹误差表示为 式(6)的丢番图方程: 中.(t)=山,(t)-(),中(t)为翼伞系统当前航向 1=E(z1)A(z1)△+zE(z1), 角.这样把翼伞系统的轨迹跟踪问题转化为航向跟 j=1,2,…,N. (6) 踪问题 式中:E和F为待求多项式,并且有: aE;=j-1,oFj na, E,=e+eal+…+epr-w E=f力+2+…+fn&. 期望轨迹 严(x(i)y(i) 将式(5)两边同乘E,△z可得 E,A△y(k+j)= 实际轨迹 EB△u(k+j-1)+E(k+j). (7) (x(t)) 将式(7)代入式(6)得 (x(i-1)y(i-1) y(k +j)E BAu(k +j-1)+Fy(k)+ 图5翼伞系统实际轨迹与期望轨迹 E(k+). Fig.5 The actual and desired traces of the parafoil 得到未来输出y(k+)的预测值: y(k +jl k)E BAu(k +j-1)+Fy(k), 3翼伞系统航迹跟踪控制器 j=1,2,…,N. (8) 航向控制器用于控制翼伞系统的航向,使得翼 为将E,B△u(k+j-1)中已知信息和未知信息 伞系统在给定的航向指令下运动. 分离开来,引人式(9)丢番图方程: 3.1广义预测控制 EB=G+zH,j=1,2,…,N. (9)》 广义预测控制(generalized predictive control, 式中:G和H为待求多项式用递推算法可以解得E、 GP℃)是Clark等在1987年提出,采用了长时段的优 F、G、H,N为预测步长, 化性能指标,并结合辨识和自校正机制,表现出良好 目标函数为 的鲁棒性2]。 N 预测控制的主要特征是以受控自回归积分滑动 J=Σ[(k+j1)-ya(k+)]2+ 1 平均模型(controlled auto--regressive integrated mov- N。 A∑[△u(k+j-1)]2. (10) ing-average,CARIMA)为基础Ia),为了由k时刻的 输入、输出数据对(层+)时刻的系统进行预测,而引 式中:N。为控制步长,且N≤N.A≥0为控制加权因 入了Diophantine方程,并采用递推算法求解. 子.y(k+)是柔化后的设定值序列,满足: 由于CARIMA模型比较接近实际对象特性,且 rya(k)=y(k), 具有积分作用,因此它不仅能为自校正鲁棒控制器 ya(k+j)=aya(k+j-1)+(1-a)y,(k). 的设计奠定良好的基础,而且能有效地消除系统的 式中:0<α≤1为柔化因子,y,是当前设定值, 静态偏差。 将预测方程(8)代入式(10),并优化求解得 用CARIMA模型将系统表示为如下形式: △u(k),由此可得到当前k时刻的控制量: A(:)y(k)=B(z1)u(k-1)+C(z1)(k)/△. u(k)=u(k-1)+△u(k). 式中:y(k)、u(k)、5(k)分别为系统输出、输入及干 依据广义预测控制的求解过程2,41,可以得 扰信号,A(z-1)、B(z-1)、C(z1)分别是n、m和n阶 到预测控制量u(k),u(k)即为翼伞的单侧下偏量, 的z的多项式,△=1-z u(k)的改变,可以使得式(4)中的力F和力矩M发 如果系统时滞大于零,则B(:)多项式开头的一项 生变化,进而使得式(4)中的变量[⊙.o,o.]改 或几项的系数等于零,为了简单起见,令C(z1)=1.x 变,即翼伞的航向产生偏转,从而实现对翼伞的航向 是:变换的逆算子,称为后移时间算子.有: 进行控制