正在加载图片...
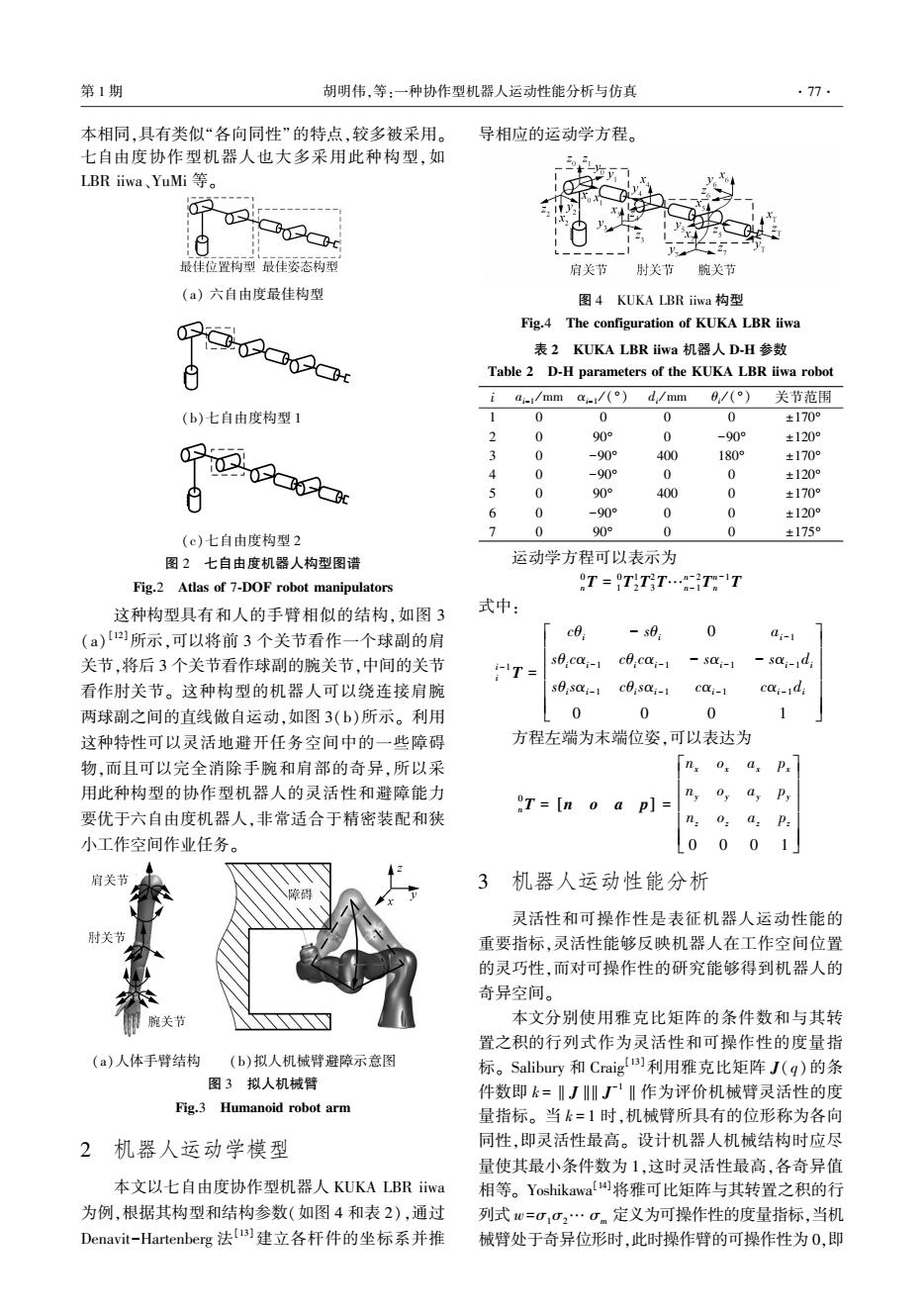
第1期 胡明伟,等:一种协作型机器人运动性能分析与仿真 ·77 本相同,具有类似“各向同性”的特点,较多被采用。 导相应的运动学方程。 七自由度协作型机器人也大多采用此种构型,如 LBRiiwa、YuMi等。 最佳位置构型最准姿态构型 肩关节肘关节 腕关节 (a)六自由度最佳构型 图4 KUKA LBR iiwa构型 Fig.4 The configuration of KUKA LBR iiwa 表2 KUKA LBR iiwa机器人D-H参数 8 Table 2 D-H parameters of the KUKA LBR iiwa robot ia-i/mma-/(o)d,/mm 0,/()关节范围 (b)七自由度构型1 1 0 0 0 0 ±170° 2 0 90° 0 -90 ±120° 0 -90° 400 180 ±170° 4 0 -90° 0 0 ±120° 白 0 90° 400 0 ±170° 6 0 -90 0 0 ±120° 7 0 90 0 0 (c)七自由度构型2 ±175° 图2七自由度机器人构型图谱 运动学方程可以表示为 Fig.2 Atlas of 7-DOF robot manipulators 9T=TTT…T-T 这种构型具有和人的手臂相似的结构,如图3 式中: (a)[所示,可以将前3个关节看作一个球副的肩 ce -s0: 0 ai-1 关节,将后3个关节看作球副的腕关节,中间的关节 s0;co;-1 c0;ca;-1 -s:-1 sai-di 看作肘关节。这种构型的机器人可以绕连接肩腕 s0;sai-1 c0:s0a:-1 CO:-1 ca:-1di 两球副之间的直线做自运动,如图3(b)所示。利用 0 0 0 1 这种特性可以灵活地避开任务空间中的一些障碍 方程左端为末端位姿,可以表达为 物,而且可以完全消除手腕和肩部的奇异,所以采 n: Ox a p: 用此种构型的协作型机器人的灵活性和避障能力 T=[n o a p]= n 0,a,P 要优于六自由度机器人,非常适合于精密装配和狭 P 小工作空间作业任务。 0001 肩关节 3机器人运动性能分析 障碍 灵活性和可操作性是表征机器人运动性能的 肘关节 重要指标,灵活性能够反映机器人在工作空间位置 的灵巧性,而对可操作性的研究能够得到机器人的 奇异空间。 眼腕关节 本文分别使用雅克比矩阵的条件数和与其转 置之积的行列式作为灵活性和可操作性的度量指 (a)人体手臂结构 (b)拟人机械臂避障示意图 标。Salibury和Craig)]利用雅克比矩阵J(g)的条 图3拟人机械臂 件数即k=‖J川广‖作为评价机械臂灵活性的度 Fig.3 Humanoid robot arm 量指标。当k=1时,机械臂所具有的位形称为各向 2机器人运动学模型 同性,即灵活性最高。设计机器人机械结构时应尽 量使其最小条件数为1,这时灵活性最高,各奇异值 本文以七自由度协作型机器人KUKA LBR iiwa 相等。Yoshikawa将雅可比矩阵与其转置之积的行 为例,根据其构型和结构参数(如图4和表2),通过 列式w=0,σ2…σm定义为可操作性的度量指标,当机 Denavit-Hartenberg法[i)建立各杆件的坐标系并推 械臂处于奇异位形时,此时操作臂的可操作性为0,即本相同,具有类似“各向同性”的特点,较多被采用。 七自由度协作型机器人也大多采用此种构型,如 LBR iiwa、YuMi 等。 (a) 六自由度最佳构型 (b)七自由度构型 1 (c)七自由度构型 2 图 2 七自由度机器人构型图谱 Fig.2 Atlas of 7⁃DOF robot manipulators 这种构型具有和人的手臂相似的结构,如图 3 (a) [12]所示,可以将前 3 个关节看作一个球副的肩 关节,将后 3 个关节看作球副的腕关节,中间的关节 看作肘关节。 这种构型的机器人可以绕连接肩腕 两球副之间的直线做自运动,如图 3(b)所示。 利用 这种特性可以灵活地避开任务空间中的一些障碍 物,而且可以完全消除手腕和肩部的奇异,所以采 用此种构型的协作型机器人的灵活性和避障能力 要优于六自由度机器人,非常适合于精密装配和狭 小工作空间作业任务。 (a)人体手臂结构 (b)拟人机械臂避障示意图 图 3 拟人机械臂 Fig.3 Humanoid robot arm 2 机器人运动学模型 本文以七自由度协作型机器人 KUKA LBR iiwa 为例,根据其构型和结构参数(如图 4 和表 2),通过 Denavit-Hartenberg 法[13]建立各杆件的坐标系并推 导相应的运动学方程。 图 4 KUKA LBR iiwa 构型 Fig.4 The configuration of KUKA LBR iiwa 表 2 KUKA LBR iiwa 机器人 D⁃H 参数 Table 2 D⁃H parameters of the KUKA LBR iiwa robot i ai-1 / mm αi-1 / (°) di / mm θi / (°) 关节范围 1 0 0 0 0 ±170° 2 0 90° 0 -90° ±120° 3 0 -90° 400 180° ±170° 4 0 -90° 0 0 ±120° 5 0 90° 400 0 ±170° 6 0 -90° 0 0 ±120° 7 0 90° 0 0 ±175° 运动学方程可以表示为 0 nT = 0 1T 1 2T 2 3T…n-2 n-1T n-1 n T 式中: i-1 i T = cθi - sθi 0 ai-1 sθi cαi-1 cθi cαi-1 - sαi-1 - sαi-1 di sθi sαi-1 cθi sαi-1 cαi-1 cαi-1 di 0 0 0 1 é ë ê ê ê ê ê ù û ú ú ú ú ú 方程左端为末端位姿,可以表达为 0 nT = [n o a p] = nx ox ax px ny oy ay py nz oz az pz 0 0 0 1 é ë ê ê ê ê ê ù û ú ú ú ú ú 3 机器人运动性能分析 灵活性和可操作性是表征机器人运动性能的 重要指标,灵活性能够反映机器人在工作空间位置 的灵巧性,而对可操作性的研究能够得到机器人的 奇异空间。 本文分别使用雅克比矩阵的条件数和与其转 置之积的行列式作为灵活性和可操作性的度量指 标。 Salibury 和 Craig [13]利用雅克比矩阵 J( q)的条 件数即 k =‖J‖‖J -1‖作为评价机械臂灵活性的度 量指标。 当 k = 1 时,机械臂所具有的位形称为各向 同性,即灵活性最高。 设计机器人机械结构时应尽 量使其最小条件数为 1,这时灵活性最高,各奇异值 相等。 Yoshikawa [14]将雅可比矩阵与其转置之积的行 列式 w=σ1σ2… σm 定义为可操作性的度量指标,当机 械臂处于奇异位形时,此时操作臂的可操作性为 0,即 第 1 期 胡明伟,等:一种协作型机器人运动性能分析与仿真 ·77·