正在加载图片...
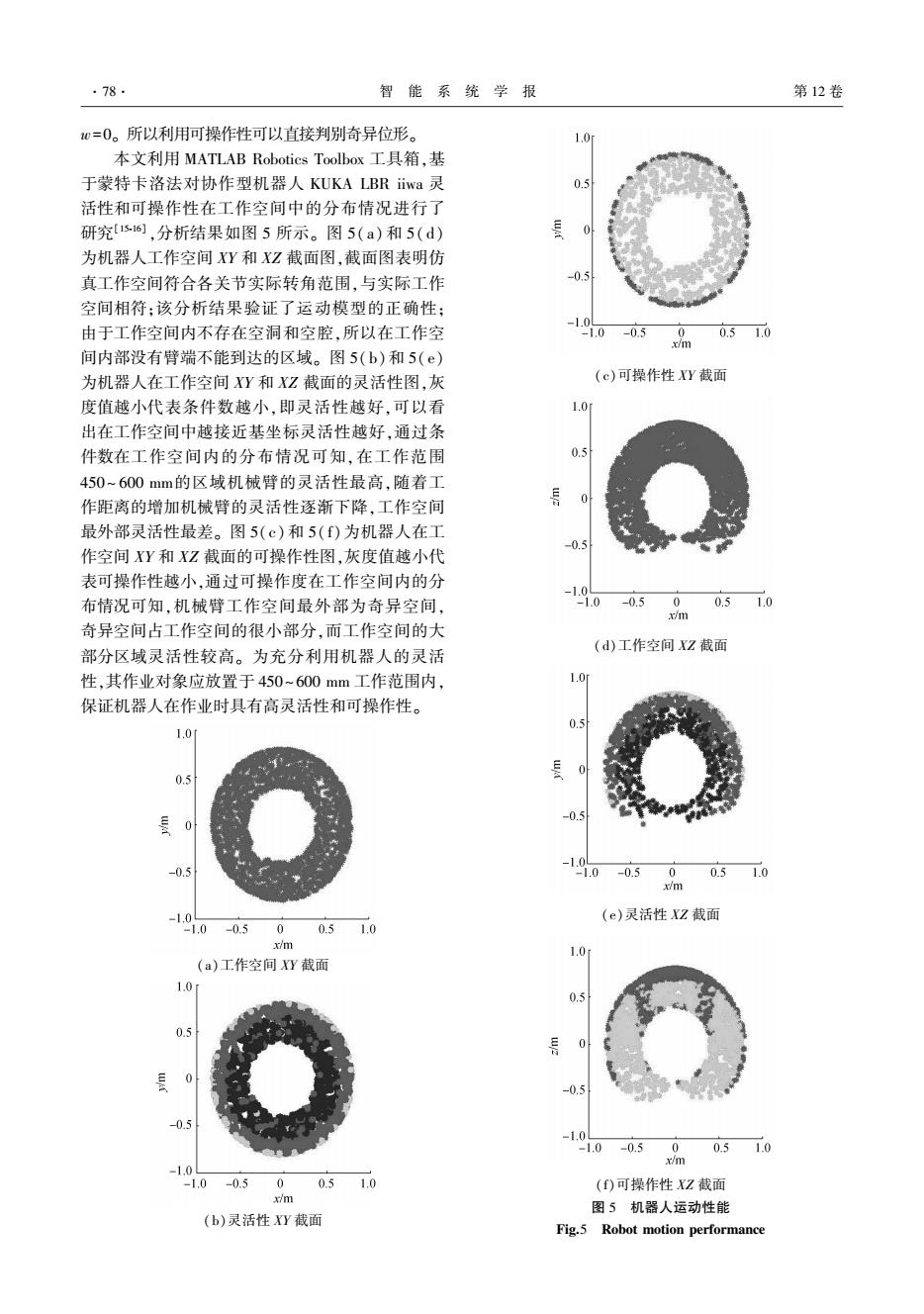
·78 智能系统学报 第12卷 0=0。所以利用可操作性可以直接判别奇异位形。 1.0 本文利用MATLAB Robotics Toolbox工具箱,基 于蒙特卡洛法对协作型机器人KUKA LBR iiwa灵 0.5 活性和可操作性在工作空间中的分布情况进行了 研究116),分析结果如图5所示。图5(a)和5(d) 为机器人工作空间XY和XZ截面图,截面图表明仿 真工作空间符合各关节实际转角范围,与实际工作 -0.5 空间相符:该分析结果验证了运动模型的正确性; 由于工作空间内不存在空洞和空腔,所以在工作空 -1.0 -0.5 0 0.51.0 x/m 间内部没有臂端不能到达的区域。图5(b)和5(e) 为机器人在工作空间XY和XZ截面的灵活性图,灰 (c)可操作性Y截面 度值越小代表条件数越小,即灵活性越好,可以看 1.0 出在工作空间中越接近基坐标灵活性越好,通过条 件数在工作空间内的分布情况可知,在工作范围 0.5 450~600mm的区域机械臂的灵活性最高,随着工 作距离的增加机械臂的灵活性逐渐下降,工作空间 最外部灵活性最差。图5(c)和5(f)为机器人在工 -0.5 作空间Y和XZ截面的可操作性图,灰度值越小代 表可操作性越小,通过可操作度在工作空间内的分 -.0 布情况可知,机械臂工作空间最外部为奇异空间, -1.0 -0.50 0.51.0 x/m 奇异空间占工作空间的很小部分,而工作空间的大 (d)工作空间XZ截面 部分区域灵活性较高。为充分利用机器人的灵活 性,其作业对象应放置于450~600mm工作范围内, 1.0 保证机器人在作业时具有高灵活性和可操作性。 0.5 1.0 05 0 -0.5 -1.0 -0.5 0 0.51.0 x/m -1.0 (e)灵活性XZ截面 .0 -0.5 0 0.51.0 x/m 1.0 (a)工作空间XY截面 1.0 0.5 0.5 -0.5 -0.5 -1.0 -1.0 -0.5 0 0.51.0 x/m -1.0 -1.0-0.500.510 ()可操作性XZ截面 x/m 图5机器人运动性能 (b)灵活性XY截面 Fig.5 Robot motion performancew=0。 所以利用可操作性可以直接判别奇异位形。 本文利用 MATLAB Robotics Toolbox 工具箱,基 于蒙特卡洛法对协作型机器人 KUKA LBR iiwa 灵 活性和可操作性在工作空间中的分布情况进行了 研究[15⁃16] ,分析结果如图 5 所示。 图 5(a)和 5( d) 为机器人工作空间 XY 和 XZ 截面图,截面图表明仿 真工作空间符合各关节实际转角范围,与实际工作 空间相符;该分析结果验证了运动模型的正确性; 由于工作空间内不存在空洞和空腔,所以在工作空 间内部没有臂端不能到达的区域。 图 5(b)和 5(e) 为机器人在工作空间 XY 和 XZ 截面的灵活性图,灰 度值越小代表条件数越小,即灵活性越好,可以看 出在工作空间中越接近基坐标灵活性越好,通过条 件数在工作空间内的分布情况可知,在工作范围 450~ 600 mm的区域机械臂的灵活性最高,随着工 作距离的增加机械臂的灵活性逐渐下降,工作空间 最外部灵活性最差。 图 5(c)和 5( f)为机器人在工 作空间 XY 和 XZ 截面的可操作性图,灰度值越小代 表可操作性越小,通过可操作度在工作空间内的分 布情况可知,机械臂工作空间最外部为奇异空间, 奇异空间占工作空间的很小部分,而工作空间的大 部分区域灵活性较高。 为充分利用机器人的灵活 性,其作业对象应放置于 450~600 mm 工作范围内, 保证机器人在作业时具有高灵活性和可操作性。 (a)工作空间 XY 截面 (b)灵活性 XY 截面 (c)可操作性 XY 截面 (d)工作空间 XZ 截面 (e)灵活性 XZ 截面 (f)可操作性 XZ 截面 图 5 机器人运动性能 Fig.5 Robot motion performance ·78· 智 能 系 统 学 报 第 12 卷