正在加载图片...
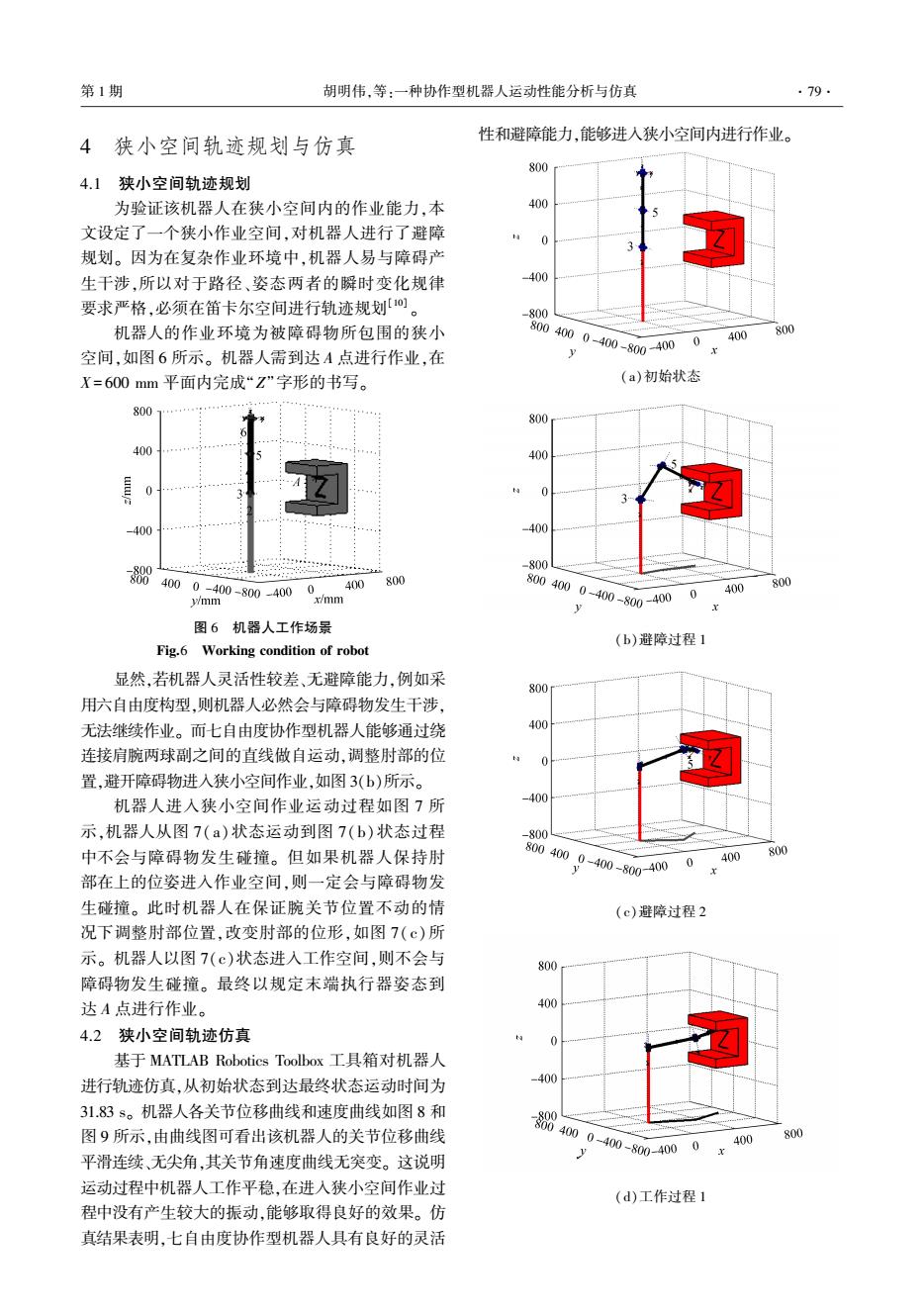
第1期 胡明伟,等:一种协作型机器人运动性能分析与仿真 ·79· 4 狭小空间轨迹规划与仿真 性和避障能力,能够进入狭小空间内进行作业。 800 4.1狭小空间轨迹规划 为验证该机器人在狭小空间内的作业能力,本 400 文设定了一个狭小作业空间,对机器人进行了避障 0 规划。因为在复杂作业环境中,机器人易与障碍产 生干涉,所以对于路径、姿态两者的瞬时变化规律 400 要求严格,必须在笛卡尔空间进行轨迹规划o。 -800 机器人的作业环境为被障碍物所包围的狭小 800400-400-800400 0 400 800 空间,如图6所示。机器人需到达A点进行作业,在 y X=600mm平面内完成“Z”字形的书写。 (a)初始状态 8001日 800 400 ” 400 0 0 -400 -400 -800 884000-400-800-40 0400 800 8004000-400-800-400 0 400 800 y/mm x/mm 图6机器人工作场景 (b)避障过程1 Fig.6 Working condition of robot 显然,若机器人灵活性较差、无避障能力,例如采 800 用六自由度构型,则机器人必然会与障碍物发生干涉, 无法继续作业。而七自由度协作型机器人能够通过绕 400 连接肩腕两球副之间的直线做自运动,调整肘部的位 置,避开障碍物进入狭小空间作业,如图3(b)所示。 机器人进入狭小空间作业运动过程如图7所 -400 示,机器人从图7(a)状态运动到图7(b)状态过程 -800 中不会与障碍物发生碰撞。但如果机器人保持肘 800400 0-400-800400 0 400 800 部在上的位姿进入作业空间,则一定会与障碍物发 生碰撞。此时机器人在保证腕关节位置不动的情 (c)避障过程2 况下调整肘部位置,改变肘部的位形,如图7(©)所 示。机器人以图7(c)状态进入工作空间,则不会与 800 障碍物发生碰撞。最终以规定末端执行器姿态到 达A点进行作业。 400 4.2狭小空间轨迹仿真 基于MATLAB Robotics Toolbox工具箱对机器人 进行轨迹仿真,从初始状态到达最终状态运动时间为 -400 31.83s。机器人各关节位移曲线和速度曲线如图8和 图9所示,由曲线图可看出该机器人的关节位移曲线 8004000-400-8004000x400 800 平滑连续、无尖角,其关节角速度曲线无突变。这说明 运动过程中机器人工作平稳,在进入狭小空间作业过 (d)工作过程1 程中没有产生较大的振动,能够取得良好的效果。仿 真结果表明,七自由度协作型机器人具有良好的灵活4 狭小空间轨迹规划与仿真 4.1 狭小空间轨迹规划 为验证该机器人在狭小空间内的作业能力,本 文设定了一个狭小作业空间,对机器人进行了避障 规划。 因为在复杂作业环境中,机器人易与障碍产 生干涉,所以对于路径、姿态两者的瞬时变化规律 要求严格,必须在笛卡尔空间进行轨迹规划[10] 。 机器人的作业环境为被障碍物所包围的狭小 空间,如图 6 所示。 机器人需到达 A 点进行作业,在 X = 600 mm 平面内完成“Z”字形的书写。 图 6 机器人工作场景 Fig.6 Working condition of robot 显然,若机器人灵活性较差、无避障能力,例如采 用六自由度构型,则机器人必然会与障碍物发生干涉, 无法继续作业。 而七自由度协作型机器人能够通过绕 连接肩腕两球副之间的直线做自运动,调整肘部的位 置,避开障碍物进入狭小空间作业,如图 3(b)所示。 机器人进入狭小空间作业运动过程如图 7 所 示,机器人从图 7(a)状态运动到图 7(b)状态过程 中不会与障碍物发生碰撞。 但如果机器人保持肘 部在上的位姿进入作业空间,则一定会与障碍物发 生碰撞。 此时机器人在保证腕关节位置不动的情 况下调整肘部位置,改变肘部的位形,如图 7(c)所 示。 机器人以图 7(c)状态进入工作空间,则不会与 障碍物发生碰撞。 最终以规定末端执行器姿态到 达 A 点进行作业。 4.2 狭小空间轨迹仿真 基于 MATLAB Robotics Toolbox 工具箱对机器人 进行轨迹仿真,从初始状态到达最终状态运动时间为 31.83 s。 机器人各关节位移曲线和速度曲线如图 8 和 图 9 所示,由曲线图可看出该机器人的关节位移曲线 平滑连续、无尖角,其关节角速度曲线无突变。 这说明 运动过程中机器人工作平稳,在进入狭小空间作业过 程中没有产生较大的振动,能够取得良好的效果。 仿 真结果表明,七自由度协作型机器人具有良好的灵活 性和避障能力,能够进入狭小空间内进行作业。 (a)初始状态 (b)避障过程 1 (c)避障过程 2 (d)工作过程 1 第 1 期 胡明伟,等:一种协作型机器人运动性能分析与仿真 ·79·