正在加载图片...
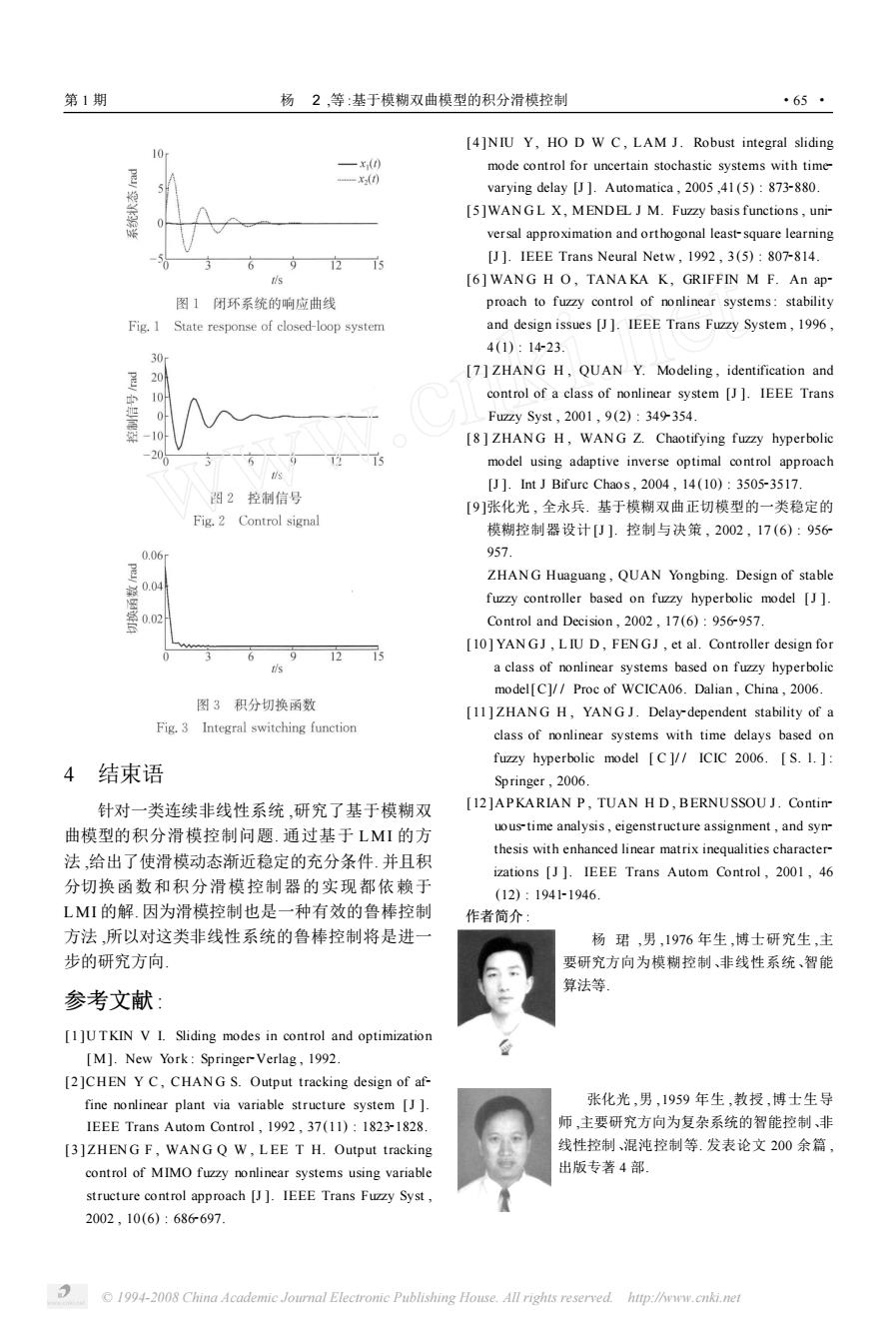
第1期 杨2,等:基于模糊双曲模型的积分滑模控制 *65* [4]NIU Y,HO D W C,LAM J.Robust integral sliding 10 一x0 mode control for uncertain stochastic systems with time- -(t0) varying delay [J].Automatica,2005,41(5):873-880. [5]WANGL X,MENDEL J M.Fuzzy basis functions,uni- versal approximation and orthogonal least-square learning 21 [J ]IEEE Trans Neural Netw,1992,3(5):807-814. s [6]WANG H O,TANAKA K,GRIFFIN M F.An ap- 图1闭环系统的响应曲线 proach to fuzzy control of nonlinear systems:stability Fig.1 State response of closed-loop system and design issues [J].IEEE Trans Fuzzy System,1996, 4(1):14-23. 30 230 [7]ZHANG H,QUAN Y.Modeling,identification and 10 control of a class of nonlinear system [J].IEEE Trans Fuzzy Syst,2001,9(2):349354. 10 [8]ZHANG H,WANG Z.Chaotifying fuzzy hyperbolic model using adaptive inverse optimal control approach s [U].Int J Bifurc Cha0s,2004,14(10):350s3517. 图2控制信号 [9]张化光,全永兵.基于模糊双曲正切模型的一类稳定的 Fig.2 Control signal 模糊控制器设计[J].控制与决策,2002,17(6):956 0.06 957. ZHANG Huaguang,QUAN Yongbing.Design of stable 0.04 fuzzy controller based on fuzzy hyperbolic model [J]. 0.02 Control and Decision,2002,17(6):956-957. [10]YANGJ,LIU D,FENGJ,et al.Controller design for 12 a class of nonlinear systems based on fuzzy hyperbolic model[C]//Proc of WCICA06.Dalian,China,2006. 图3积分切换函数 [11]ZHANG H,YANGJ.Delay-dependent stability of a Fig.3 Integral switching function class of nonlinear systems with time delays based on fuzzy hyperbolic model [C]//ICIC 2006.[S.1.] 4 结束语 Springer,2006. 针对一类连续非线性系统,研究了基于模糊双 [12]APKARIAN P,TUAN H D,BERNUSSOU J.Contim 曲模型的积分滑模控制问题.通过基于LMI的方 uous-time analysis,eigenstructure assignment,and syn- thesis with enhanced linear matrix inequalities character- 法,给出了使滑模动态渐近稳定的充分条件.并且积 izations [J ]IEEE Trans Autom Control,2001,46 分切换函数和积分滑模控制器的实现都依赖于 (12):1941-1946. LMI的解.因为滑模控制也是一种有效的鲁棒控制 作者简介: 方法,所以对这类非线性系统的鲁棒控制将是进一 杨珺,男,1976年生,博士研究生,主 步的研究方向 要研究方向为模糊控制、非线性系统、智能 算法等。 参考文献: [I]UTKIN V I.Sliding modes in control and optimization [M].New York:Springer-Verlag,1992. [2]CHEN Y C,CHANG S.Output tracking design of af- fine nonlinear plant via variable structure system [J]. 张化光,男,1959年生,教授,博士生导 IEEE Trans Autom Control,1992,37(11):1823-1828. 师,主要研究方向为复杂系统的智能控制、非 [3]ZHENG F,WANG Q W,LEE T H.Output tracking 线性控制、混沌控制等.发表论文200余篇, control of MIMO fuzzy nonlinear systems using variable 出版专著4部 structure control approach [J ]IEEE Trans Fuzzy Syst, 2002,10(6):686697. 1994-2008 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net4 结束语 针对一类连续非线性系统 ,研究了基于模糊双 曲模型的积分滑模控制问题. 通过基于 LMI 的方 法 ,给出了使滑模动态渐近稳定的充分条件. 并且积 分切换函数和积分滑模控制器的实现都依赖于 LMI 的解. 因为滑模控制也是一种有效的鲁棒控制 方法 ,所以对这类非线性系统的鲁棒控制将是进一 步的研究方向. 参考文献 : [1 ]U T KIN V I. Sliding modes in control and optimization [ M ]. New York : Springer2Verlag , 1992. [2 ]CHEN Y C , CHAN G S. Output tracking design of af2 fine nonlinear plant via variable structure system [J ]. IEEE Trans Autom Control , 1992 , 37 (11) : 182321828. [3 ] ZHEN G F , WAN G Q W , L EE T H. Output tracking control of MIMO fuzzy nonlinear systems using variable structure control approach [J ]. IEEE Trans Fuzzy Syst , 2002 , 10 (6) : 6862697. [4 ]NIU Y , HO D W C , LAM J. Robust integral sliding mode control for uncertain stochastic systems with time2 varying delay [J ]. Automatica , 2005 ,41 (5) : 8732880. [5 ]WAN G L X , MENDEL J M. Fuzzy basis functions , uni2 versal approximation and orthogonal least2square learning [J ]. IEEE Trans Neural Netw , 1992 , 3 (5) : 8072814. [6 ] WAN G H O , TANA KA K , GRIFFIN M F. An ap2 proach to fuzzy control of nonlinear systems: stability and design issues [J ]. IEEE Trans Fuzzy System , 1996 , 4 (1) : 14223. [ 7 ] ZHAN G H , QUAN Y. Modeling , identification and control of a class of nonlinear system [J ]. IEEE Trans Fuzzy Syst , 2001 , 9 (2) : 3492354. [ 8 ] ZHAN G H , WAN G Z. Chaotifying fuzzy hyperbolic model using adaptive inverse optimal control approach [J ]. Int J Bifurc Chaos , 2004 , 14 (10) : 350523517. [9 ]张化光 , 全永兵. 基于模糊双曲正切模型的一类稳定的 模糊控制器设计[J ]. 控制与决策 , 2002 , 17 (6) : 9562 957. ZHAN G Huaguang , QUAN Yongbing. Design of stable fuzzy controller based on fuzzy hyperbolic model [J ]. Control and Decision , 2002 , 17 (6) : 9562957. [10 ] YAN G J , L IU D , FEN GJ , et al. Controller design for a class of nonlinear systems based on fuzzy hyperbolic model[C]/ / Proc of WCICA06. Dalian , China , 2006. [11 ] ZHAN G H , YAN G J. Delay2dependent stability of a class of nonlinear systems with time delays based on fuzzy hyperbolic model [ C ]/ / ICIC 2006. [ S. l. ] : Springer , 2006. [12 ]APKARIAN P , TUAN H D , BERNUSSOU J. Contin2 uous2time analysis , eigenstructure assignment , and syn2 thesis with enhanced linear matrix inequalities character2 izations [J ]. IEEE Trans Autom Control , 2001 , 46 (12) : 194121946. 作者简介 : 杨 ,男 ,1976 年生 ,博士研究生 ,主 要研究方向为模糊控制、非线性系统、智能 算法等. 张化光 ,男 ,1959 年生 ,教授 ,博士生导 师 ,主要研究方向为复杂系统的智能控制、非 线性控制、混沌控制等. 发表论文 200 余篇 , 出版专著 4 部. 第 1 期 杨 − ,等 :基于模糊双曲模型的积分滑模控制 · 56 · © 1994-2008 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net 珺