正在加载图片...
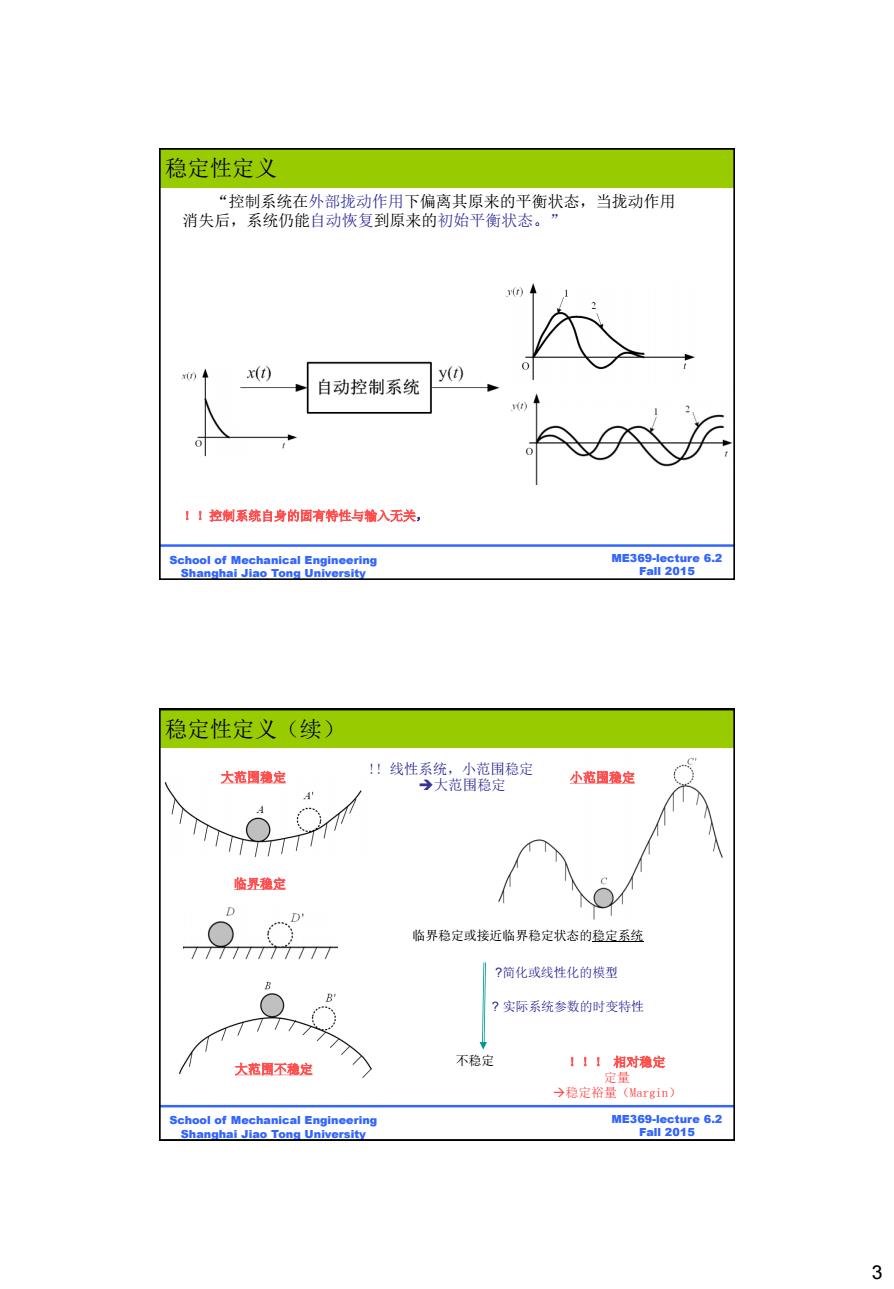
稳定性定义 “控制系统在外部拢动作用下偏离其原来的平衡状态,当拢动作用 消失后,系统仍能自动恢复到原来的初始平衡状态。” v(r) x(t) y(t) 自动控制系统 11控制系统自身的固有特性与输入无关, School of Mechanical Engineering ME369-lecture 6.2 Shanghai Jiao Tong University Fall 2015 稳定性定义(续) 大花圆稳定 !线性系统,小范围稳定 →大范围稳定 小范围稳定 临界稳定 D D 临界稳定或接近临界稳定状态的稳定系统 7TT777T777T ?简化或线性化的模型 ?实际系统参数的时变特性 77 大花圆不糖定 入 不稳定 1【1相对稳定 定量 →稳定裕量(Margin) School of Mechanical Engineering ME369-lecture 6.2 Shanghai Jiao Tong University Fall 2015 33 ME369-lecture 6.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University “控制系统在外部拢动作用下偏离其原来的平衡状态,当拢动作用 消失后,系统仍能自动恢复到原来的初始平衡状态。” !!控制系统自身的固有特性与输入无关, 稳定性定义 ME369-lecture 6.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 大范围稳定 小范围稳定 !! 线性系统,小范围稳定 大范围稳定 大范围不稳定 临界稳定 !!! 相对稳定 定量 稳定裕量(Margin) ?简化或线性化的模型 ? 实际系统参数的时变特性 不稳定 临界稳定或接近临界稳定状态的稳定系统 稳定性定义(续)