正在加载图片...
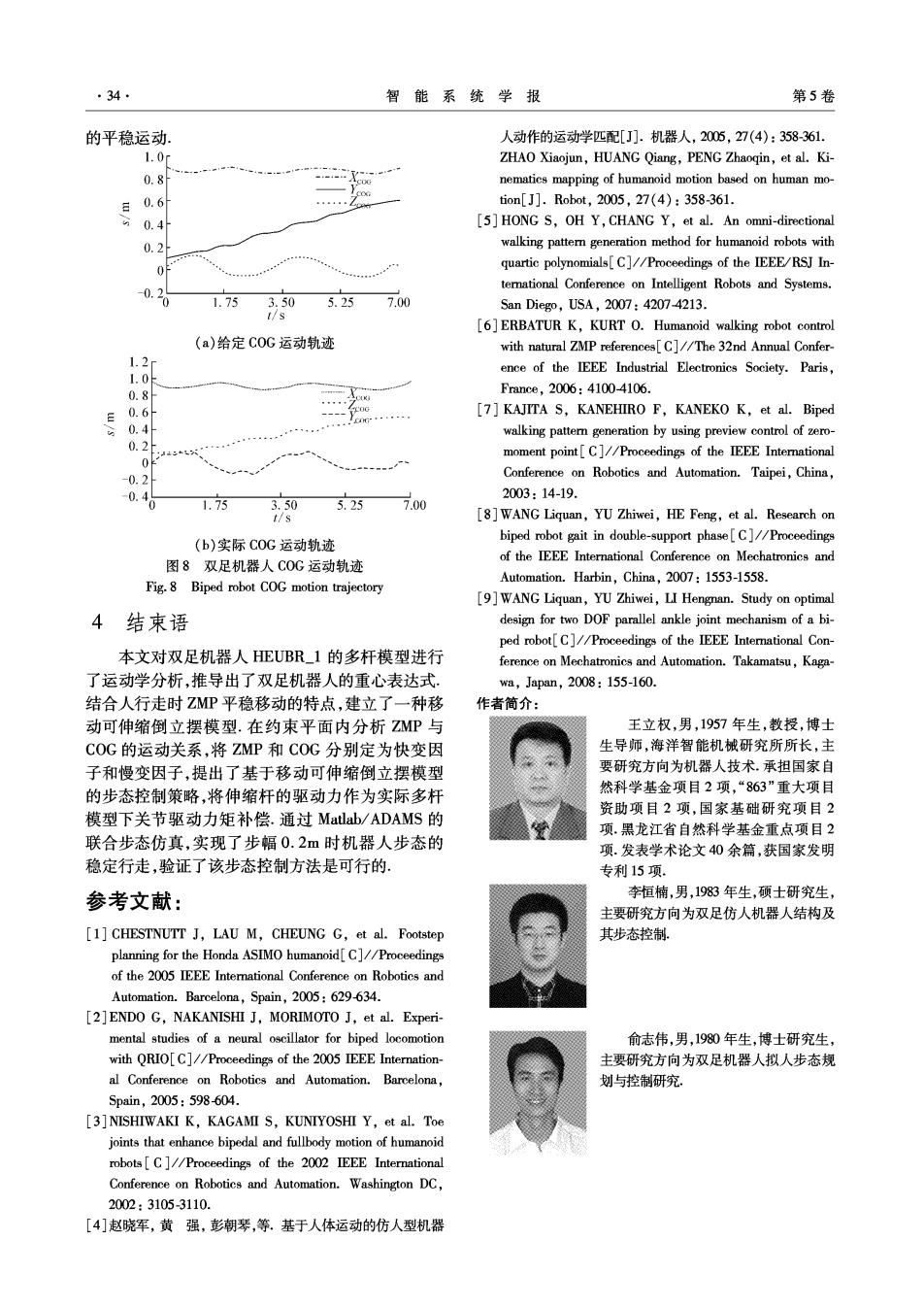
·34 智能系统学报 第5卷 的平稳运动, 人动作的运动学匹配[J】.机器人,2005,27(4):358-361. 1.0m ZHAO Xiaojun,HUANG Qiang,PENG Zhaoqin,et al.Ki- 0.8 nematics mapping of humanoid motion based on human mo- 0.6 tion[J].Robot,2005,27(4):358-361. 0.4 [5]HONG S,OH Y,CHANG Y,et al.An omni-directional 0.2 walking patter generation method for humanoid robots with quartic polynomials[C]//Proceedings of the IEEE/RSJ In- temational Conference on Intelligent Robots and Systems. 1.75 3.50 5.25 7.00 San Diege0,USA,2007:4207-4213. [6]ERBATUR K,KURT O.Humanoid walking robot control (a)给定C0G运动轨迹 with natural ZMP references[C]//The 32nd Annual Confer- ence of the IEEE Industrial Electronics Society.Paris, 1.0 0.8 France,2006:4100-4106. LOG E 0.6 [7]KAJITA S,KANEHIRO F,KANEKO K,et al.Biped 0.4 walking pattern generation by using preview control of zero- 0.2 0 moment point[C]//Proceedings of the IEEE International -0.2 Conference on Robotics and Automation.Taipei,China, -0.4 2003:14-19. 1.73 3.50 5.25 7.00 t/s [8]WANG Liquan,YU Zhiwei,HE Feng,et al.Research on (b)实际COG运动轨迹 biped robot gait in double-support phase[C]//Proceedings 图8双足机器人COG运动轨迹 of the IEEE International Conference on Mechatronics and Fig.8 Biped robot COG motion trajectory Automation.Harbin,China,2007:1553-1558. [9]WANG Liquan,YU Zhiwei,LI Hengnan.Study on optimal 4 结束语 design for two DOF parallel ankle joint mechanism of a bi- ped robot[C]//Proceedings of the IEEE International Con- 本文对双足机器人HEUBR_1的多杆模型进行 ference on Mechatronics and Automation.Takamatsu,Kaga- 了运动学分析,推导出了双足机器人的重心表达式. wa,Japan,2008:155-160. 结合人行走时ZMP平稳移动的特点,建立了一种移 作者简介: 动可伸缩倒立摆模型.在约束平面内分析ZMP与 王立权,男,1957年生,教授,博士 COG的运动关系,将ZMP和COG分别定为快变因 生导师,海洋智能机械研究所所长,主 子和慢变因子,提出了基于移动可伸缩倒立摆模型 要研究方向为机器人技术.承担国家自 的步态控制策略,将伸缩杆的驱动力作为实际多杆 然科学基金项目2项,“863”重大项目 模型下关节驱动力矩补偿.通过Matlab/ADAMS的 资助项目2项,国家基础研究项目2 项.黑龙江省自然科学基金重点项目2 联合步态仿真,实现了步幅0.2m时机器人步态的 项.发表学术论文40余篇,获国家发明 稳定行走,验证了该步态控制方法是可行的, 专利15项. 参考文献: 李恒楠,男,1983年生,硕士研究生, 主要研究方向为双足仿人机器人结构及 [1]CHESTNUTT J,LAU M,CHEUNG G,et al.Footstep 其步态控制。 planning for the Honda ASIMO humanoid[C]//Proceedings of the 2005 IEEE Intemational Conference on Robotics and Automation.Barcelona,Spain,2005:629-634. 2]ENDO G,NAKANISHI J,MORIMOTO J,et al.Experi- mental studies of a neural oscillator for biped locomotion 俞志伟,男,1980年生,博士研究生, with QRIO[C]//Proceedings of the 2005 IEEE Internation- 主要研究方向为双足机器人拟人步态规 al Conference on Robotics and Automation.Barcelona, 划与控制研究。 Spain,2005:598-604. [3]NISHIWAKI K,KAGAMI S,KUNIYOSHI Y,et al.Toe joints that enhance bipedal and fullbody motion of humanoid robots[C]//Proceedings of the 2002 IEEE International Conference on Robotics and Automation.Washington DC, 2002:3105-3110. [4]赵晓军,黄强,彭朝琴,等。基于人体运动的仿人型机器