正在加载图片...
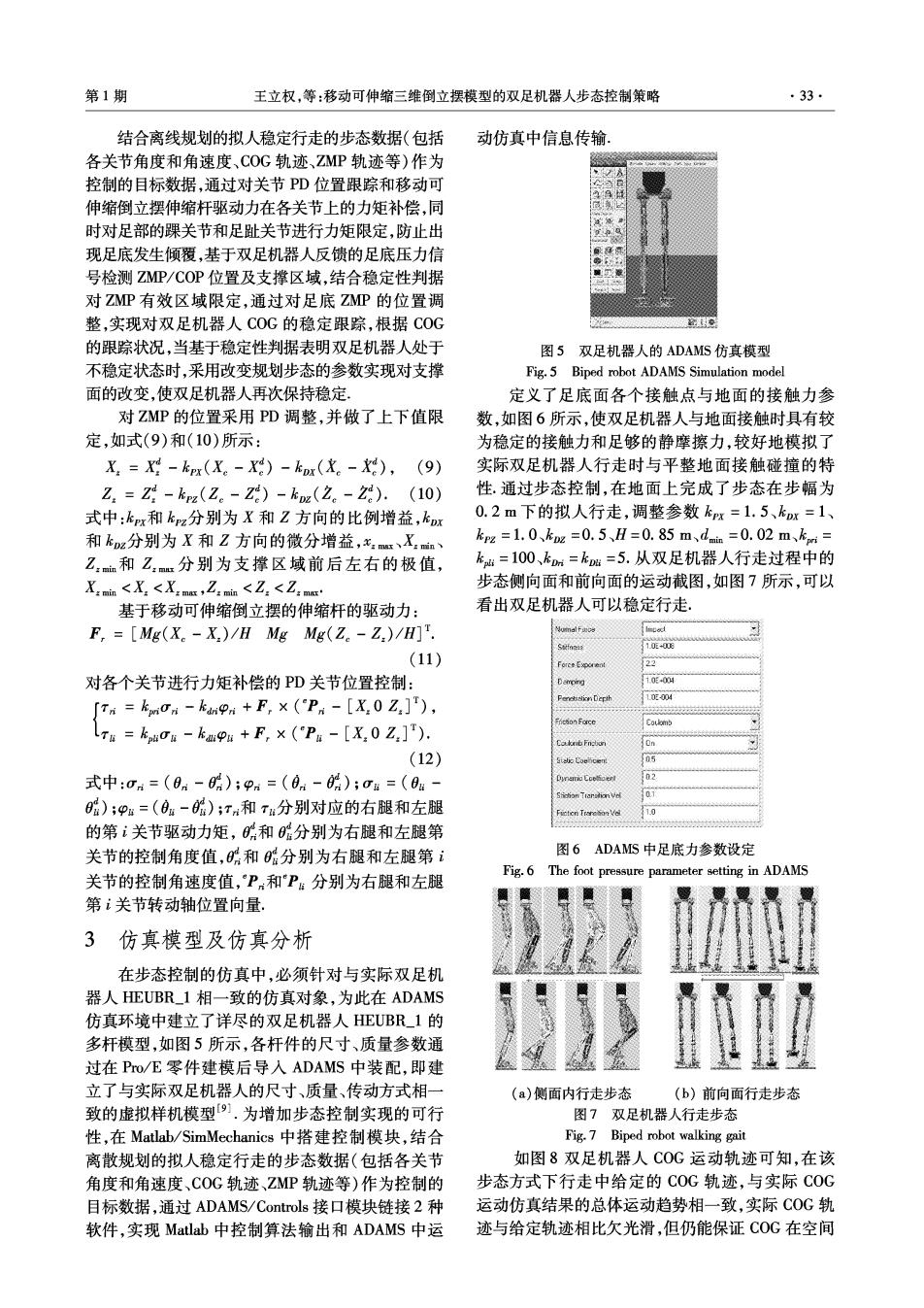
第1期 王立权,等:移动可伸缩三维倒立摆模型的双足机器人步态控制策略 ·33· 结合离线规划的拟人稳定行走的步态数据(包括 动仿真中信息传输: 各关节角度和角速度、COG轨迹、ZMP轨迹等)作为 控制的目标数据,通过对关节PD位置跟踪和移动可 伸缩倒立摆伸缩杆驱动力在各关节上的力矩补偿,同 时对足部的踝关节和足趾关节进行力矩限定,防止出 现足底发生倾覆,基于双足机器人反馈的足底压力信 号检测ZMP/COP位置及支撑区域,结合稳定性判据 对ZP有效区域限定,通过对足底ZP的位置调 整,实现对双足机器人COG的稳定跟踪,根据C0G 的跟踪状况,当基于稳定性判据表明双足机器人处于 图5双足机器人的ADAMS仿真模型 不稳定状态时,采用改变规划步态的参数实现对支撑 Fig.5 Biped robot ADAMS Simulation model 面的改变,使双足机器人再次保持稳定 定义了足底面各个接触点与地面的接触力参 对ZMP的位置采用PD调整,并做了上下值限 数,如图6所示,使双足机器人与地面接触时具有较 定,如式(9)和(10)所示: 为稳定的接触力和足够的静摩擦力,较好地模拟了 X=X-kr(X。-X)-kr(X。-),(9) 实际双足机器人行走时与平整地面接触碰撞的特 Z.=Z-krz(Z。-Z)-kz(2。-2).(10) 性.通过步态控制,在地面上完成了步态在步幅为 式中:kpx和kz分别为X和Z方向的比例增益,kox 0.2m下的拟人行走,调整参数krx=1.5、kx=1、 和kz分别为X和Z方向的微分增益,x、Xmn、 krz=1.0、kz=0.5、H=0.85m、dmm=0.02m、km= Z:min和Z:m分别为支撑区域前后左右的极值, k=100、km=k贴=5.从双足机器人行走过程中的 X:min <X<Xm min<<Z:mt 步态侧向面和前向面的运动截图,如图7所示,可以 基于移动可伸缩倒立摆的伸缩杆的驱动力: 看出双足机器人可以稳定行走, F,=[Mg(X。-X)/H MgMg(Z。-Z)/H] 10E40 (11) Force Exponen 22 对各个关节进行力矩补偿的PD关节位置控制: Demping 1.0004 「tn=km0a-knpn+F,×(Pm-[X.0Z]), Fenchstion Dcpth 10正00 ,,,.,,词 Fricion Force Ta=kOa-kpu+F,×(Pa-[X0Z]T). Cauknb Fncbion (12) 03 式中:on=(0n-);pn=(0m-片);o4=(0a- 02 Sicion Tiarsion Vol );P:=(0:-);T和T:分别对应的右腿和左腿 10 的第关节驱动力矩,和分别为右腿和左腿第 关节的控制角度值,片和分别为右腿和左腿第i 图6 ADAMS中足底力参数设定 关节的控制角速度值,P和P:分别为右腿和左腿 Fig.6 The foot pressure parameter setting in ADAMS 第关节转动轴位置向量: 3 仿真模型及仿真分析 在步态控制的仿真中,必须针对与实际双足机 器人HEUBR1相一致的仿真对象,为此在ADAMS 仿真环境中建立了详尽的双足机器人HEUBR_1的 多杆模型,如图5所示,各杆件的尺寸、质量参数通 过在Pro/E零件建模后导入ADAMS中装配,即建 立了与实际双足机器人的尺寸、质量、传动方式相一 (a)侧面内行走步态 (b)前向面行走步态 致的虚拟样机模型9).为增加步态控制实现的可行 图7双足机器人行走步态 性,在Matlab/SimMechanics中搭建控制模块,结合 Fig.7 Biped robot walking gait 离散规划的拟人稳定行走的步态数据(包括各关节 如图8双足机器人COG运动轨迹可知,在该 角度和角速度、COG轨迹、ZMP轨迹等)作为控制的 步态方式下行走中给定的COG轨迹,与实际COG 目标数据,通过ADAMS/Controls接口模块链接2种 运动仿真结果的总体运动趋势相一致,实际COG轨 软件,实现Matlab中控制算法输出和ADAMS中运 迹与给定轨迹相比欠光滑,但仍能保证C0G在空间