正在加载图片...
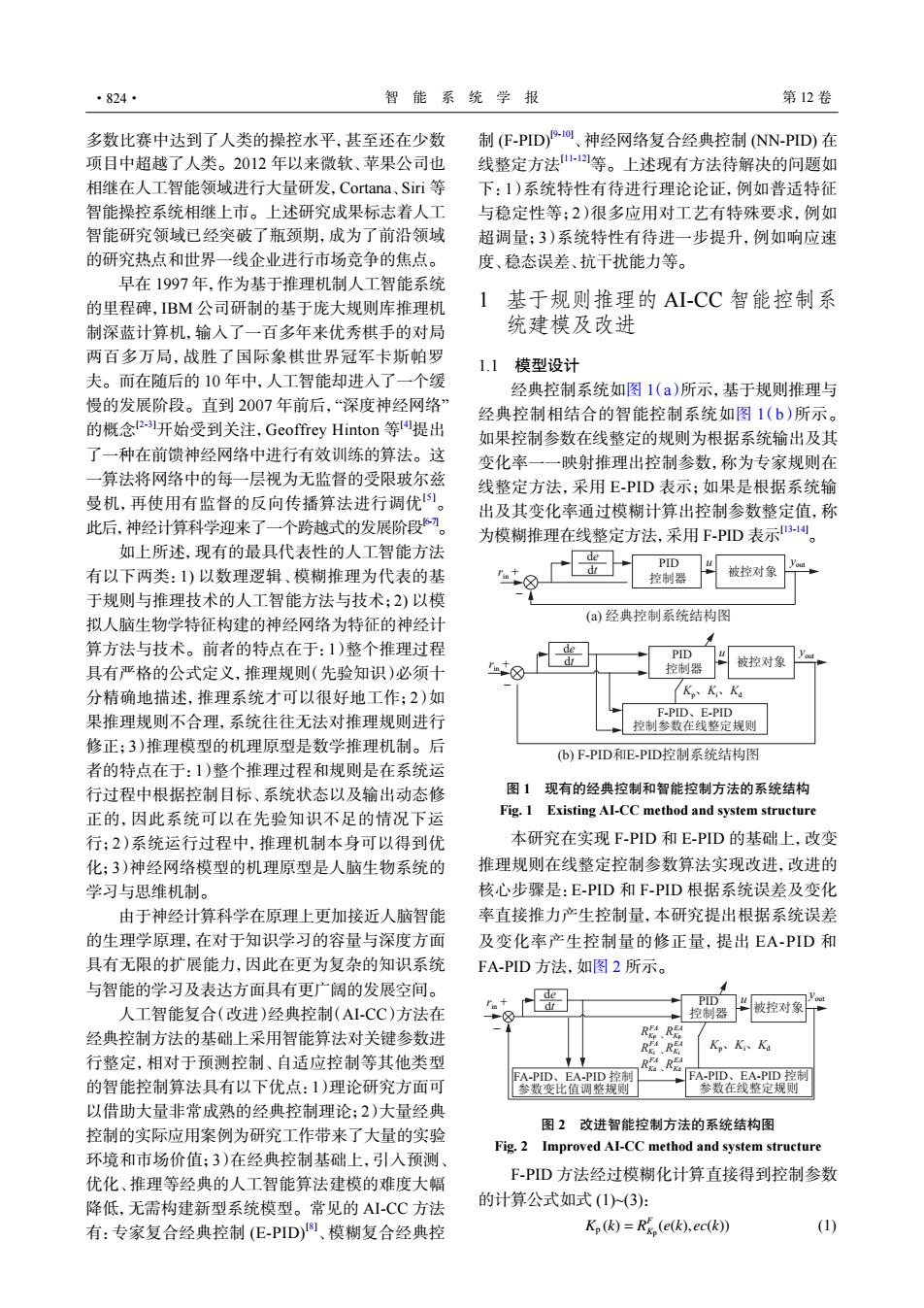
·824· 智能系统学报 第12卷 多数比赛中达到了人类的操控水平,甚至还在少数 制(F-PID)O、神经网络复合经典控制NN-PID)在 项目中超越了人类。2012年以来微软、苹果公司也 线整定方法等。上述现有方法待解决的问题如 相继在人工智能领域进行大量研发,Cortana、Siri等 下:1)系统特性有待进行理论论证,例如普适特征 智能操控系统相继上市。上述研究成果标志着人工 与稳定性等:2)很多应用对工艺有特殊要求,例如 智能研究领域已经突破了瓶颈期,成为了前沿领域 超调量:3)系统特性有待进一步提升,例如响应速 的研究热点和世界一线企业进行市场竞争的焦点。 度、稳态误差、抗干扰能力等。 早在1997年,作为基于推理机制人工智能系统 的里程碑,BM公司研制的基于庞大规则库推理机 1 基于规则推理的AICC智能控制系 制深蓝计算机,输入了一百多年来优秀棋手的对局 统建模及改进 两百多万局,战胜了国际象棋世界冠军卡斯帕罗 1.1 模型设计 夫。而在随后的10年中,人工智能却进入了一个缓 经典控制系统如图1(a)所示,基于规则推理与 慢的发展阶段。直到2007年前后,“深度神经网络” 经典控制相结合的智能控制系统如图1(b)所示。 的概念2-l开始受到关注,Geoffrey Hinton等提出 如果控制参数在线整定的规则为根据系统输出及其 了一种在前馈神经网络中进行有效训练的算法。这 变化率一一映射推理出控制参数,称为专家规则在 一算法将网络中的每一层视为无监督的受限玻尔兹 线整定方法,采用E-PID表示;如果是根据系统输 曼机,再使用有监督的反向传播算法进行调优。 出及其变化率通过模糊计算出控制参数整定值,称 此后,神经计算科学迎来了一个跨越式的发展阶段。 为模糊推理在线整定方法,采用F-PD表示3。 如上所述,现有的最具代表性的人工智能方法 de PID 有以下两类:1)以数理逻辑、模糊推理为代表的基 控制器 被控对象 于规则与推理技术的人工智能方法与技术:2)以模 拟人脑生物学特征构建的神经网络为特征的神经计 (a)经典控制系统结构图 算方法与技术。前者的特点在于:1)整个推理过程 PID 被控对象 具有严格的公式定义,推理规则(先验知识)必须十 控制器 分精确地描述,推理系统才可以很好地工作;2)如 /Kg K Ka 果推理规则不合理,系统往往无法对推理规则进行 FPID、E-PID 控制参数在线整定规则 修正:3)推理模型的机理原型是数学推理机制。后 b)F-PID和E-PD控制系统结构图 者的特点在于:1)整个推理过程和规则是在系统运 行过程中根据控制目标、系统状态以及输出动态修 图1现有的经典控制和智能控制方法的系统结构 正的,因此系统可以在先验知识不足的情况下运 Fig.1 Existing Al-CC method and system structure 行;2)系统运行过程中,推理机制本身可以得到优 本研究在实现F-PD和E-PID的基础上,改变 化;3)神经网络模型的机理原型是人脑生物系统的 推理规则在线整定控制参数算法实现改进,改进的 学习与思维机制。 核心步骤是:E-PID和F-PID根据系统误差及变化 由于神经计算科学在原理上更加接近人脑智能 率直接推力产生控制量,本研究提出根据系统误差 的生理学原理,在对于知识学习的容量与深度方面 及变化率产生控制量的修正量,提出EA-PID和 具有无限的扩展能力,因此在更为复杂的知识系统 FA-PID方法,如图2所示。 与智能的学习及表达方面具有更广阔的发展空间。 PID 人工智能复合(改进)经典控制(AI-CC)方法在 d 控制器 被控对象 经典控制方法的基础上采用智能算法对关键参数进 K,K、Ka 行整定,相对于预测控制、自适应控制等其他类型 RR EA-PID控制 FA-PID、EA-PD控制 的智能控制算法具有以下优点:1)理论研究方面可 参数变比值调整规则 参数在线整定规则 以借助大量非常成熟的经典控制理论;2)大量经典 图2改进智能控制方法的系统结构图 控制的实际应用案例为研究工作带来了大量的实验 Fig.2 Improved Al-CC method and system structure 环境和市场价值:3)在经典控制基础上,引入预测、 优化、推理等经典的人工智能算法建模的难度大幅 F-PD方法经过模糊化计算直接得到控制参数 降低,无需构建新型系统模型。常见的AI-CC方法 的计算公式如式(1)(3): 有:专家复合经典控制(E-PID)⑧、模糊复合经典控 K,()=R,(e(k),ec(k) (1)多数比赛中达到了人类的操控水平,甚至还在少数 项目中超越了人类。2012 年以来微软、苹果公司也 相继在人工智能领域进行大量研发,Cortana、Siri 等 智能操控系统相继上市。上述研究成果标志着人工 智能研究领域已经突破了瓶颈期,成为了前沿领域 的研究热点和世界一线企业进行市场竞争的焦点。 早在 1997 年,作为基于推理机制人工智能系统 的里程碑,IBM 公司研制的基于庞大规则库推理机 制深蓝计算机,输入了一百多年来优秀棋手的对局 两百多万局,战胜了国际象棋世界冠军卡斯帕罗 夫。而在随后的 10 年中,人工智能却进入了一个缓 慢的发展阶段。直到 2007 年前后,“深度神经网络” 的概念[2-3]开始受到关注,Geoffrey Hinton 等 [4]提出 了一种在前馈神经网络中进行有效训练的算法。这 一算法将网络中的每一层视为无监督的受限玻尔兹 曼机,再使用有监督的反向传播算法进行调优[5]。 此后,神经计算科学迎来了一个跨越式的发展阶段[6-7]。 如上所述,现有的最具代表性的人工智能方法 有以下两类:1) 以数理逻辑、模糊推理为代表的基 于规则与推理技术的人工智能方法与技术;2) 以模 拟人脑生物学特征构建的神经网络为特征的神经计 算方法与技术。前者的特点在于:1)整个推理过程 具有严格的公式定义,推理规则(先验知识)必须十 分精确地描述,推理系统才可以很好地工作;2)如 果推理规则不合理,系统往往无法对推理规则进行 修正;3)推理模型的机理原型是数学推理机制。后 者的特点在于:1)整个推理过程和规则是在系统运 行过程中根据控制目标、系统状态以及输出动态修 正的,因此系统可以在先验知识不足的情况下运 行;2)系统运行过程中,推理机制本身可以得到优 化;3)神经网络模型的机理原型是人脑生物系统的 学习与思维机制。 由于神经计算科学在原理上更加接近人脑智能 的生理学原理,在对于知识学习的容量与深度方面 具有无限的扩展能力,因此在更为复杂的知识系统 与智能的学习及表达方面具有更广阔的发展空间。 人工智能复合(改进)经典控制(AI-CC)方法在 经典控制方法的基础上采用智能算法对关键参数进 行整定,相对于预测控制、自适应控制等其他类型 的智能控制算法具有以下优点:1)理论研究方面可 以借助大量非常成熟的经典控制理论;2)大量经典 控制的实际应用案例为研究工作带来了大量的实验 环境和市场价值;3)在经典控制基础上,引入预测、 优化、推理等经典的人工智能算法建模的难度大幅 降低,无需构建新型系统模型。常见的 AI-CC 方法 有:专家复合经典控制 (E-PID)[8] 、模糊复合经典控 制 (F-PID)[9-10] 、神经网络复合经典控制 (NN-PID) 在 线整定方法[11-12]等。上述现有方法待解决的问题如 下:1)系统特性有待进行理论论证,例如普适特征 与稳定性等;2)很多应用对工艺有特殊要求,例如 超调量;3)系统特性有待进一步提升,例如响应速 度、稳态误差、抗干扰能力等。 1 基于规则推理的 AI-CC 智能控制系 统建模及改进 1.1 模型设计 经典控制系统如图 1(a)所示,基于规则推理与 经典控制相结合的智能控制系统如图 1(b)所示。 如果控制参数在线整定的规则为根据系统输出及其 变化率一一映射推理出控制参数,称为专家规则在 线整定方法,采用 E-PID 表示;如果是根据系统输 出及其变化率通过模糊计算出控制参数整定值,称 为模糊推理在线整定方法,采用 F-PID 表示[13-14]。 本研究在实现 F-PID 和 E-PID 的基础上,改变 推理规则在线整定控制参数算法实现改进,改进的 核心步骤是:E-PID 和 F-PID 根据系统误差及变化 率直接推力产生控制量,本研究提出根据系统误差 及变化率产生控制量的修正量,提出 EA-PID 和 FA-PID 方法,如图 2 所示。 F-PID 方法经过模糊化计算直接得到控制参数 的计算公式如式 (1)~(3): Kp (k) = R F Kp (e(k), ec(k)) (1) − de dt PID ᧗ࡦಘ − u yout rin + 㻛᧗ሩ䊑 de dt (a) 㓿ި᧗ࡦ㌫㔏㔃ᶴമ (b) F-PIDসE-PIDᣓݢ㈧㐋㏿Ჰప KpǃKiǃKd F-PIDǃE-PID ᧗ࡦ৲ᮠ൘㓯ᮤᇊ㿴ࡉ PID ᧗ࡦಘ u yout rin + 㻛᧗ሩ䊑 图 1 现有的经典控制和智能控制方法的系统结构 Fig. 1 Existing AI-CC method and system structure − de dt KpǃKiǃKd u yout rin + FA-PIDǃEA-PID ᧗ࡦ ৲ᮠ൘㓯ᮤᇊ㿴ࡉ PID ᧗ࡦಘ 㻛᧗ሩ䊑 FA-PIDǃEA-PID ᧗ࡦ ৲ᮠਈ∄٬䈳ᮤ㿴ࡉ RKp ǃ FA RKp EA RKi ǃ FA RKi EA RKd ǃ FA RKd EA 图 2 改进智能控制方法的系统结构图 Fig. 2 Improved AI-CC method and system structure ·824· 智 能 系 统 学 报 第 12 卷