正在加载图片...
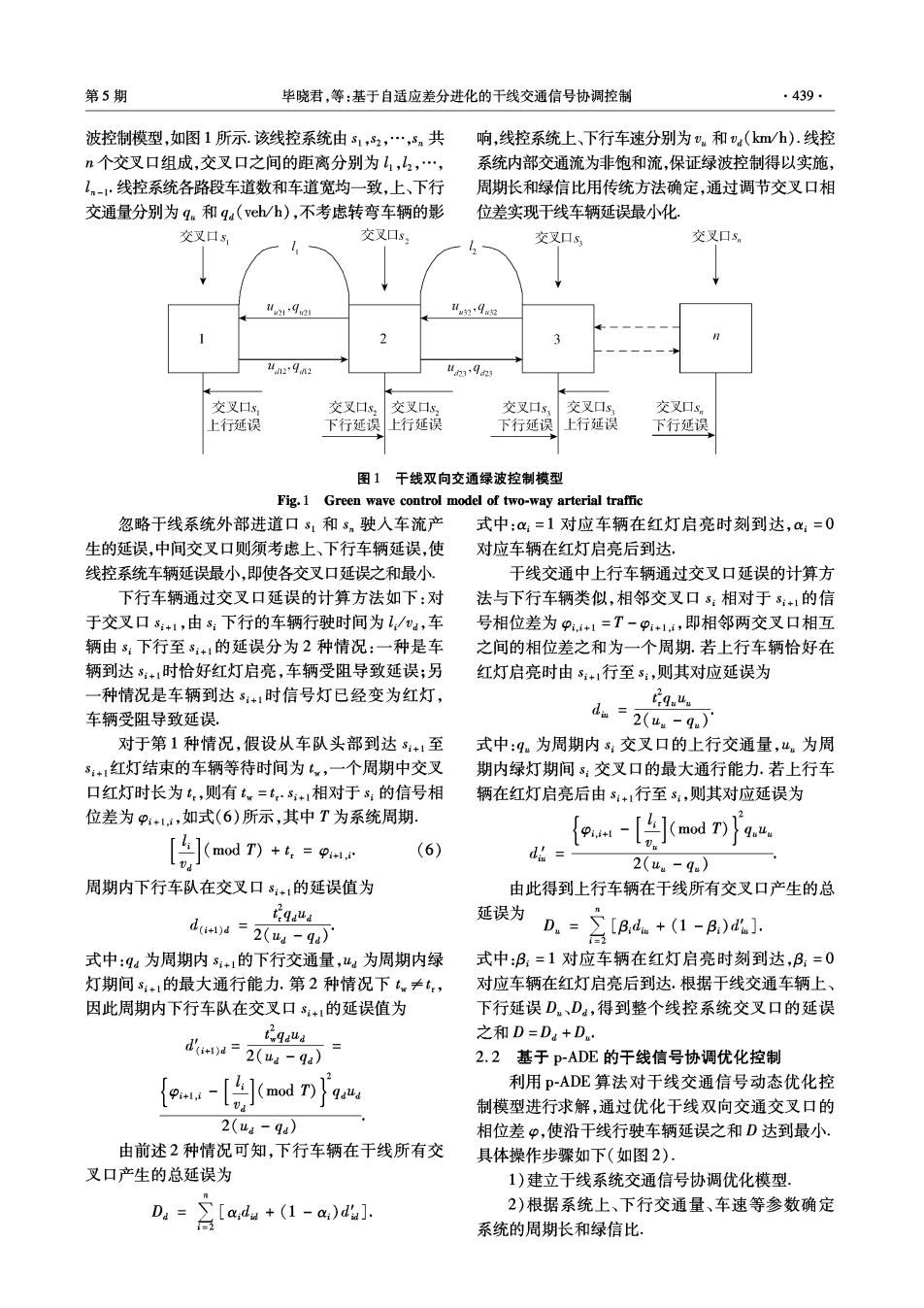
第5期 毕晓君,等:基于自适应差分进化的干线交通信号协调控制 ·439· 波控制模型,如图1所示.该线控系统由s1,2,…,5m共 响,线控系统上、下行车速分别为v,和va(km/h).线控 n个交叉口组成,交叉口之间的距离分别为1,l2,…, 系统内部交通流为非饱和流,保证绿波控制得以实施, 1n-·线控系统各路段车道数和车道宽均一致,上、下行 周期长和绿信比用传统方法确定,通过调节交叉口相 交通量分别为q.和qa(veh/h),不考虑转弯车辆的影 位差实现干线车辆延误最小化 交叉口s, 交叉口s」 交叉口s 交叉口8 wqio u292 442*9n2 uns4on 交叉口s, 交叉口s 交叉口s, 交叉口s 交叉口s 交叉口s 上行延误 下行延误 上行延误 下行延误 上行延误 下行延误 图1干线双向交通绿波控制模型 Fig.1 Green wave control model of two-way arterial traffic 忽略干线系统外部进道口$1和sn驶人车流产 式中:=1对应车辆在红灯启亮时刻到达,a:=0 生的延误,中间交叉口则须考虑上、下行车辆延误,使 对应车辆在红灯启亮后到达, 线控系统车辆延误最小,即使各交叉口延误之和最小 干线交通中上行车辆通过交叉口延误的计算方 下行车辆通过交叉口延误的计算方法如下:对 法与下行车辆类似,相邻交叉口s:相对于3:+1的信 于交叉口s+1,由s:下行的车辆行驶时间为l/a,车 号相位差为p,+1=T-p+1i,即相邻两交叉口相互 辆由:下行至s+1的延误分为2种情况:一种是车 之间的相位差之和为一个周期.若上行车辆恰好在 辆到达:+1时恰好红灯启亮,车辆受阻导致延误;另 红灯启亮时由s:+1行至:,则其对应延误为 一种情况是车辆到达+1时信号灯已经变为红灯, 9.us 车辆受阻导致延误, d.=2(.-q) 对于第1种情况,假设从车队头部到达s+1至 式中:9为周期内s:交叉口的上行交通量,“为周 s:+1红灯结束的车辆等待时间为,一个周期中交叉 期内绿灯期间s:交叉口的最大通行能力.若上行车 口红灯时长为t,则有t,=t.s+1相对于s:的信号相 辆在红灯启亮后由s+行至s,则其对应延误为 位差为+1,如式(6)所示,其中T为系统周期. 2 ](mod T)q.u. [4](modT)+t:=9+1 (6) 2(4。-9a) 周期内下行车队在交叉口$+1的延误值为 由此得到上行车辆在干线所有交叉口产生的总 Eqaua 延误为 d(+a=2(w4-9a) D. ∑[B,du+(1-B,)d]. 式中:qa为周期内s+1的下行交通量,u为周期内绿 式中:B,=1对应车辆在红灯启亮时刻到达,B=0 灯期间+1的最大通行能力.第2种情况下t≠t, 对应车辆在红灯启亮后到达,根据干线交通车辆上、 因此周期内下行车队在交叉口s+的延误值为 下行延误D.、Da,得到整个线控系统交叉口的延误 tqaua 之和D=Da+D da=2(wa-qa 2.2基于pADE的干线信号协调优化控制 12 利用p-ADE算法对干线交通信号动态优化控 制模型进行求解,通过优化干线双向交通交叉口的 2(ua-9d) 相位差P,使沿干线行驶车辆延误之和D达到最小, 由前述2种情况可知,下行车辆在干线所有交 具体操作步骤如下(如图2). 叉口产生的总延误为 1)建立干线系统交通信号协调优化模型, Da=∑[a,da+(1-a)da]. 2)根据系统上、下行交通量、车速等参数确定 2 系统的周期长和绿信比