正在加载图片...
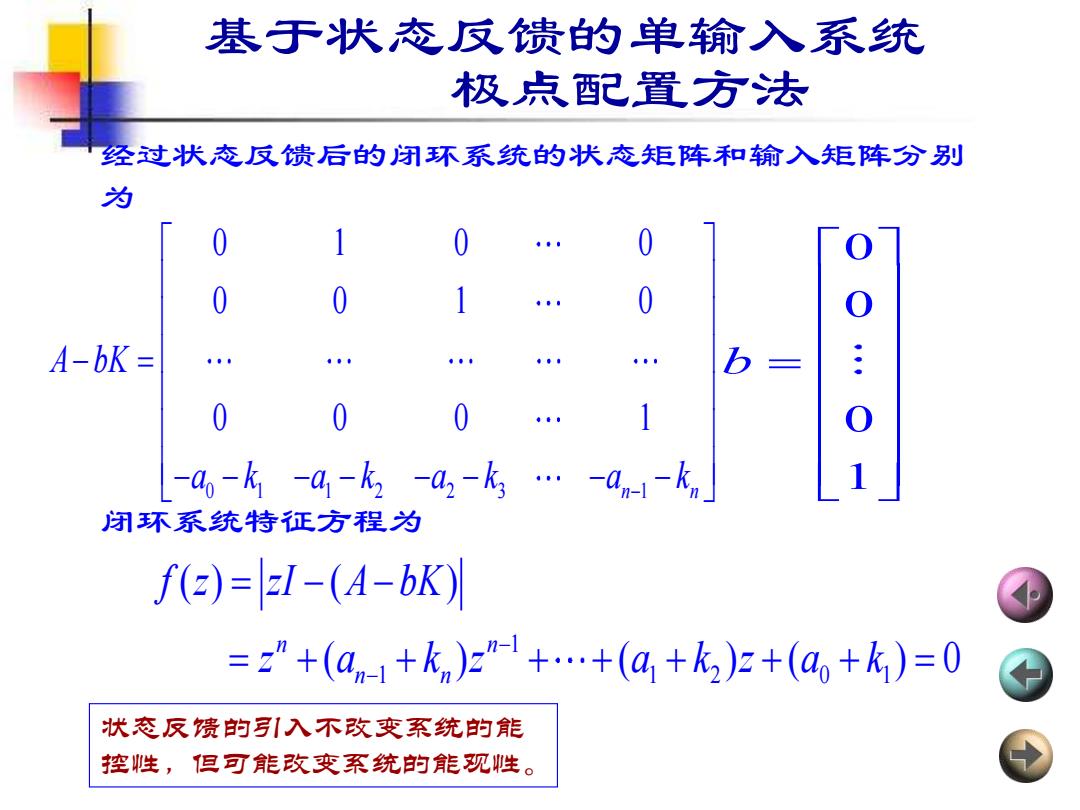
基于状态反馈的单输入系统 极点配置方法 经过状态反馈后的闭环系统的状态矩阵和输入矩阵分别 为 0 1 A-bK= b 0 0 -4-k-4-k3-42-k…-an1 闭环系统特征方程为 f()=I-(4-bK) =z”+(an+kn)z"-+…+(a+k)z+(a+k)=0 状态反馈的引入不改变系统的能 控性, 但可能改变系统的能观性。经过状态反馈后的闭环系统的状态矩阵和输入矩阵分别 为 闭环系统特征方程为 0 1 1 2 2 3 1 0 1 0 0 0 0 1 0 0 0 0 1 n n A bK a k a k a k a k − − = − − − − − − − − 0 0 0 1 b = 1 1 1 2 0 1 ( ) ( ) ( ) ( ) ( ) 0 n n n n f z zI A bK z a k z a k z a k − − = − − = + + + + + + + = 基于状态反馈的单输入系统 极点配置方法 状态反馈的引入不改变系统的能 控性,但可能改变系统的能观性