正在加载图片...
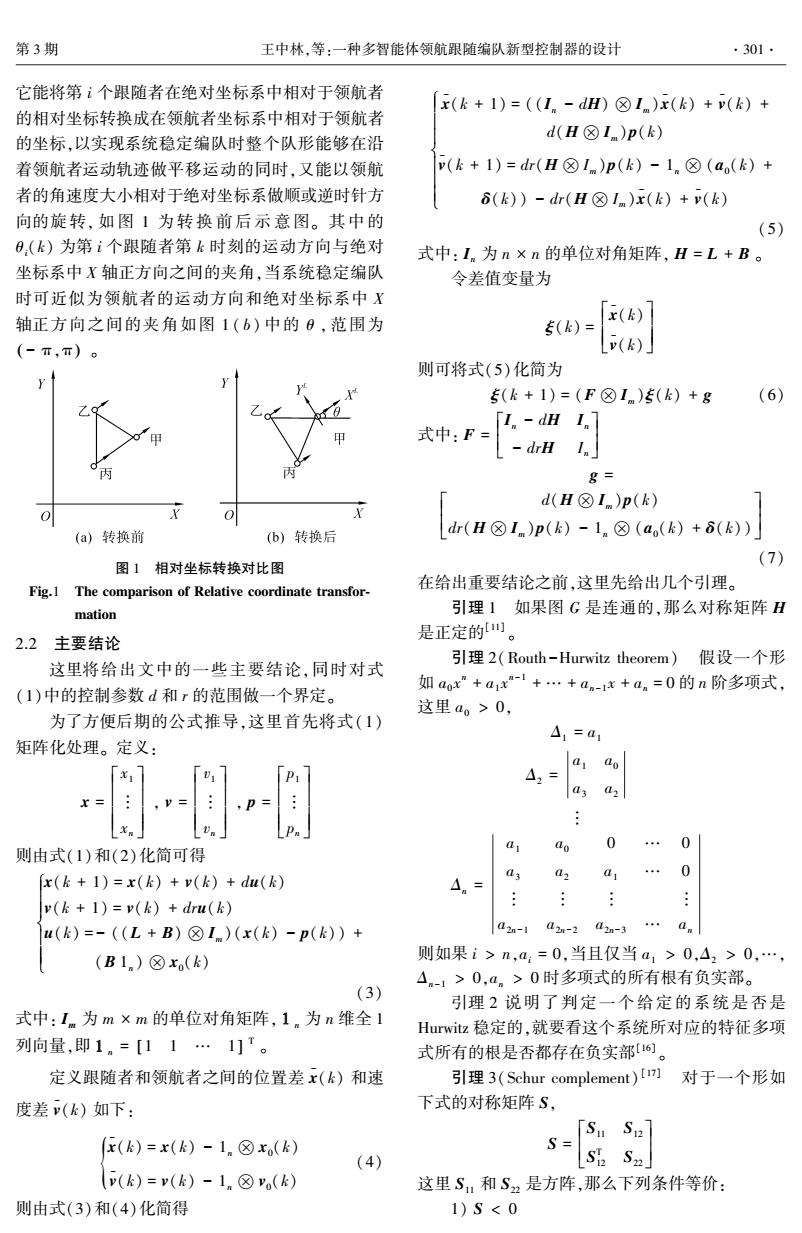
第3期 王中林,等:一种多智能体领航跟随编队新型控制器的设计 ·301- 它能将第i个跟随者在绝对坐标系中相对于领航者 x(+1)=((I-dH)I)x(k)+v(k)+ 的相对坐标转换成在领航者坐标系中相对于领航者 的坐标,以实现系统稳定编队时整个队形能够在沿 d(H☒Im)p(k) 着领航者运动轨迹做平移运动的同时,又能以领航 v(k+1)=dr(H☒Im)p(k)-1.☒(a(k)+ 者的角速度大小相对于绝对坐标系做顺或逆时针方 δ(k))-dr(H☒Im)x(k)+(k) 向的旋转,如图1为转换前后示意图。其中的 (5) 日,(k)为第i个跟随者第k时刻的运动方向与绝对 式中:I.为n×n的单位对角矩阵,H=L+B。 坐标系中X轴正方向之间的夹角,当系统稳定编队 令差值变量为 时可近似为领航者的运动方向和绝对坐标系中X ( (k 轴正方向之间的夹角如图1(b)中的8,范围为 (-T,T)。 (k)」 则可将式(5)化简为 (k+1)=(F☒Im)5(k)+g (6) 「In-dHIn 式中:F= drH 8= d(H☒Im)p(k) (a)转换前 (b)转换后 dr(H☒In)p(k)-1n☒(a(k)+6(k)) (7) 图1相对坐标转换对比图 Fig.1 The comparison of Relative coordinate transfor- 在给出重要结论之前,这里先给出几个引理。 mation 引理1如果图G是连通的,那么对称矩阵H 是正定的。 2.2主要结论 引理2(Routh-Hurwitz theorem)假设一个形 这里将给出文中的一些主要结论,同时对式 (1)中的控制参数d和r的范围做一个界定。 如aox”+a1x-1+…+a.-1x+an=0的n阶多项式, 这里a>0, 为了方便后期的公式推导,这里首先将式(1)》 矩阵化处理。定义: △1=a1 a ao △2= a3 a Xn ao 0 0 则由式(1)和(2)化简可得 ar 0 (x(k+1)=x(k)+v(k)+du(k) 03 a2 0 = v(k+1)=v(k)+dru(k) u(k)=-((L+B)I)(x(k)-p(k))+ a2n-1 a2m-2 a2m-3 ...a (B1.)⑧x(k) 则如果i>n,a:=0,当且仅当a1>0,42>0,, 4-1>0,a。>0时多项式的所有根有负实部。 (3) 引理2说明了判定一个给定的系统是否是 式中:1m为m×m的单位对角矩阵,1.为n维全1 Hurwitz稳定的,就要看这个系统所对应的特征多项 列向量,即1。=[11…1]。 式所有的根是否都存在负实部[6] 定义跟随者和领航者之间的位置差x(k)和速 引理3(Schur complement)[] 对于一个形如 度差v(k)如下: 下式的对称矩阵S, 「SS2 x(k)=x(k)-1.☒x(k) S= (4) (k)=v(k)-1.☒'(k) 这里S,和S2是方阵,那么下列条件等价: 则由式(3)和(4)化简得 1)S<0它能将第 i 个跟随者在绝对坐标系中相对于领航者 的相对坐标转换成在领航者坐标系中相对于领航者 的坐标,以实现系统稳定编队时整个队形能够在沿 着领航者运动轨迹做平移运动的同时,又能以领航 者的角速度大小相对于绝对坐标系做顺或逆时针方 向的旋 转, 如 图 1 为 转 换 前 后 示 意 图。 其 中 的 θi(k) 为第 i 个跟随者第 k 时刻的运动方向与绝对 坐标系中 X 轴正方向之间的夹角,当系统稳定编队 时可近似为领航者的运动方向和绝对坐标系中 X 轴正方向之间的夹角如图 1 ( b) 中的 θ ,范围为 ( - π,π) 。 图 1 相对坐标转换对比图 Fig.1 The comparison of Relative coordinate transfor⁃ mation 2.2 主要结论 这里将给出文中的一些主要结论,同时对式 (1)中的控制参数 d 和 r 的范围做一个界定。 为了方便后期的公式推导,这里首先将式(1) 矩阵化处理。 定义: x = x1 ︙ xn é ë ê ê ê ê ù û ú ú ú ú , v = v1 ︙ vn é ë ê ê ê ê ù û ú ú ú ú , p = p1 ︙ pn é ë ê ê ê ê ù û ú ú ú ú 则由式(1)和(2)化简可得 x(k + 1) = x(k) + v(k) + du(k) v(k + 1) = v(k) + dru(k) u(k) = - ((L + B) Im )(x(k) - p(k)) + (B 1n ) x0(k) ì î í ï ïï ï ïï (3) 式中: Im 为 m × m 的单位对角矩阵, 1 n 为 n 维全 1 列向量,即 1 n = [1 1 … 1] T 。 定义跟随者和领航者之间的位置差 x - (k) 和速 度差 v - (k) 如下: x - (k) = x(k) - 1n x0(k) v - (k) = v(k) - 1n v0(k) { (4) 则由式(3)和(4)化简得 x - (k + 1) = ((In - dH) Im )x - (k) + v - (k) + d(H Im )p(k) v - (k + 1) = dr(H Im )p(k) - 1n (a0(k) + δ(k)) - dr(H Im )x - (k) + v - (k) ì î í ï ï ï ï ï ï (5) 式中: In 为 n × n 的单位对角矩阵, H = L + B 。 令差值变量为 ξ(k) = x - (k) v - (k) é ë ê êê ù û ú úú 则可将式(5)化简为 ξ(k + 1) = (F Im )ξ(k) + g (6) 式中: F = In - dH In - drH In é ë ê ê ù û ú ú g = d(H Im )p(k) dr(H Im )p(k) - 1n (a0(k) + δ(k)) é ë ê ê ù û ú ú (7) 在给出重要结论之前,这里先给出几个引理。 引理 1 如果图 G 是连通的,那么对称矩阵 H 是正定的[11] 。 引理 2(Routh-Hurwitz theorem) 假设一个形 如 a0 x n + a1 x n-1 + … + an-1 x + an = 0 的 n 阶多项式, 这里 a0 > 0, Δ1 = a1 Δ2 = a1 a0 a3 a2 ︙ Δn = a1 a0 0 … 0 a3 a2 a1 … 0 ︙ ︙ ︙ ︙ a2n-1 a2n-2 a2n-3 … an 则如果 i > n,ai = 0,当且仅当 a1 > 0,Δ2 > 0,…, Δn-1 > 0,an > 0 时多项式的所有根有负实部。 引理 2 说明了判定一个给定的系统是否是 Hurwitz 稳定的,就要看这个系统所对应的特征多项 式所有的根是否都存在负实部[16] 。 引理 3(Schur complement) [17] 对于一个形如 下式的对称矩阵 S, S = S11 S12 S T 12 S22 é ë ê ê ù û ú ú 这里 S11 和 S22 是方阵,那么下列条件等价: 1) S < 0 第 3 期 王中林,等:一种多智能体领航跟随编队新型控制器的设计 ·301·