正在加载图片...
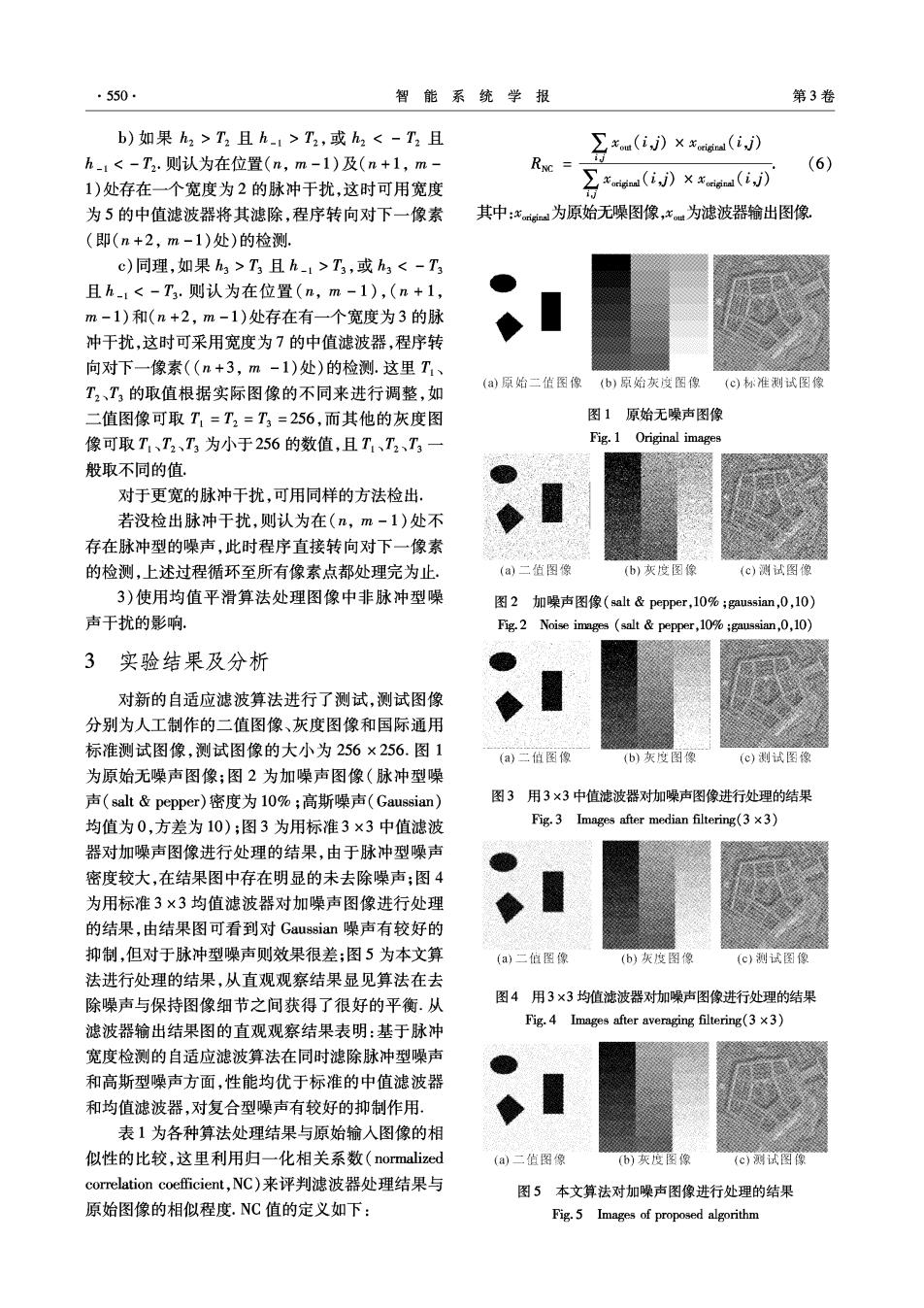
.550. 智能系统学报 第3卷 b)如果h2>T2且h-1>T2,或h2<-T2且 ∑xom(i,j)Xiginal(ij) h-1<-T2.则认为在位置(n,m-1)及(n+1,m- i (6) 1)处存在一个宽度为2的脉冲干扰,这时可用宽度 另aai)xaea(id 为5的中值滤波器将其滤除,程序转向对下一像素 其中:orig为原始无噪图像,xm为滤波器输出图像, (即(n+2,m-1)处)的检测. c)同理,如果h>T且h-1>T3,或h3<-T 且h-1<-T3.则认为在位置(n,m-1),(n+1, m-1)和(n+2,m-1)处存在有一个宽度为3的脉 冲干扰,这时可采用宽度为7的中值滤波器,程序转 向对下一像素((n+3,m-1)处)的检测.这里T (a)原始二值图像(b)原始灰度图像(c)标准测试图像 T2、T3的取值根据实际图像的不同来进行调整,如 二值图像可取T1=T2=T3=256,而其他的灰度图 图1原始无噪声图像 像可取T、T2、T3为小于256的数值,且T、T2、T3一 Fig.1 Original images 般取不同的值。 对于更宽的脉冲于忧,可用同样的方法检出, 若没检出脉冲干扰,则认为在(n,m-1)处不 存在脉冲型的噪声,此时程序直接转向对下一像素 的检测,上述过程循环至所有像素点都处理完为止 (a)二值图像 (b)灰度图像 (c)测试图像 3)使用均值平滑算法处理图像中非脉冲型噪 图2加噪声图像(salt&pepper,10%;gaussian,0,10) 声干扰的影响, Fig.2 Noise images (salt pepper,10%;gaussian,,10) 3 实验结果及分析 对新的自适应滤波算法进行了测试,测试图像 分别为人工制作的二值图像、灰度图像和国际通用 标准测试图像,测试图像的大小为256×256.图1 (a)二伯图像 (b)灰度图像 (c)测试图豫 为原始无噪声图像;图2为加噪声图像(脉冲型噪 声(salt&pepper)密度为10%;高斯噪声(Gaussian) 图3用3×3中值滤波器对加噪声图像进行处理的结果 均值为0,方差为10);图3为用标准3×3中值滤波 Fig.3 Images after median filtering(3 x3) 器对加噪声图像进行处理的结果,由于脉冲型噪声 密度较大,在结果图中存在明显的未去除噪声;图4 为用标准3×3均值滤波器对加噪声图像进行处理 的结果,由结果图可看到对Gaussian噪声有较好的 抑制,但对于脉冲型噪声则效果很差;图5为本文算 (a)二位图像 (b)灰度图像 (c)测试图像 法进行处理的结果,从直观观察结果显见算法在去 除噪声与保持图像细节之间获得了很好的平衡.从 图4用3×3均值滤波器对加噪声图像进行处理的结果 Fig.4 Images after averaging filtering(3 x3) 滤波器输出结果图的直观观察结果表明:基于脉冲 宽度检测的自适应滤波算法在同时滤除脉冲型噪声 和高斯型噪声方面,性能均优于标准的中值滤波器 和均值滤波器,对复合型噪声有较好的抑制作用 表1为各种算法处理结果与原始输入图像的相 似性的比较,这里利用归一化相关系数(normalized (a)二值图像 (b)灰度图像 (c)测试图像 correlation coefficient,NC)来评判滤波器处理结果与 图5本文算法对加噪声图像进行处理的结果 原始图像的相似程度.NC值的定义如下: Fig.5 Images of proposed algorithm