正在加载图片...
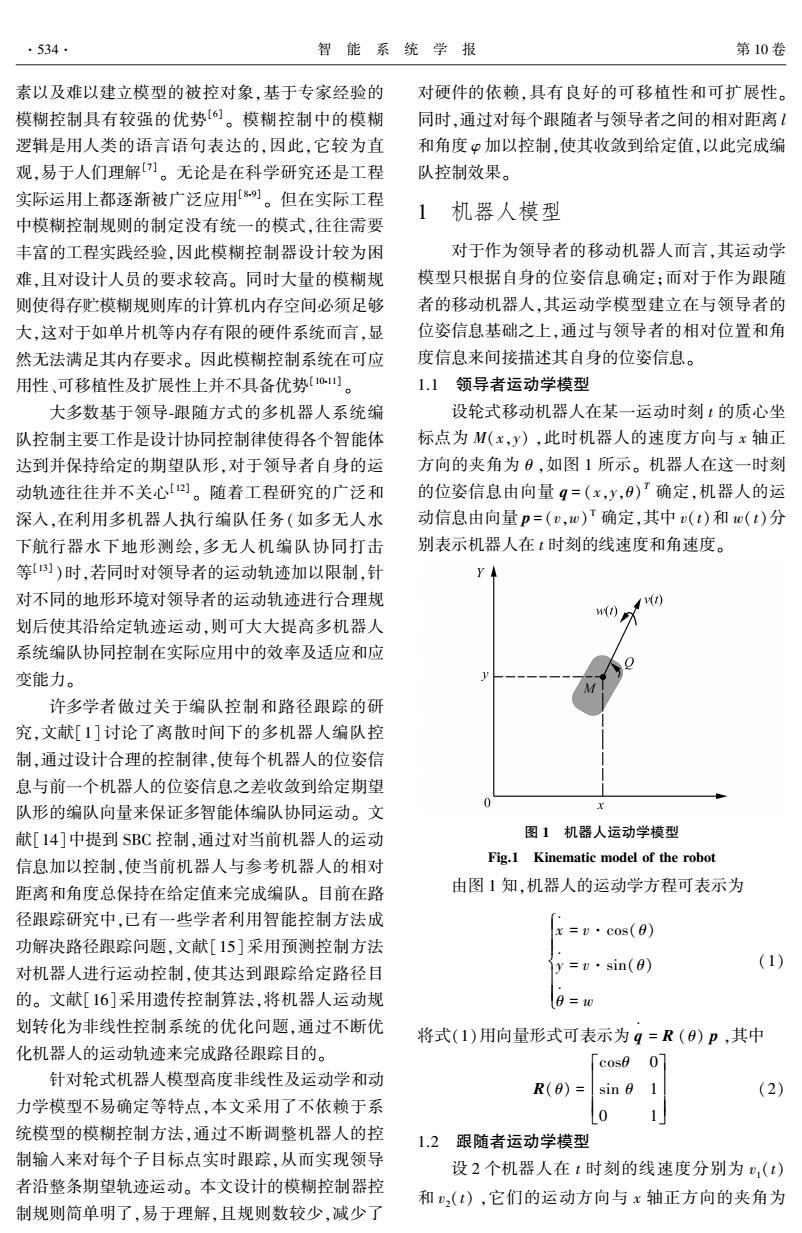
.534. 智能系统学报 第10卷 素以及难以建立模型的被控对象,基于专家经验的 对硬件的依赖,具有良好的可移植性和可扩展性。 模糊控制具有较强的优势[6。模糊控制中的模糊 同时,通过对每个跟随者与领导者之间的相对距离 逻辑是用人类的语言语句表达的,因此,它较为直 和角度φ加以控制,使其收敛到给定值,以此完成编 观,易于人们理解。无论是在科学研究还是工程 队控制效果。 实际运用上都逐渐被广泛应用8。但在实际工程 中模糊控制规则的制定没有统一的模式,往往需要 1机器人模型 丰富的工程实践经验,因此模糊控制器设计较为困 对于作为领导者的移动机器人而言,其运动学 难,且对设计人员的要求较高。同时大量的模糊规 模型只根据自身的位姿信息确定:而对于作为跟随 则使得存贮模糊规则库的计算机内存空间必须足够 者的移动机器人,其运动学模型建立在与领导者的 大,这对于如单片机等内存有限的硬件系统而言,显 位姿信息基础之上,通过与领导者的相对位置和角 然无法满足其内存要求。因此模糊控制系统在可应 度信息来间接描述其自身的位姿信息。 用性、可移植性及扩展性上并不具备优势[0。 1.1领导者运动学模型 大多数基于领导-跟随方式的多机器人系统编 设轮式移动机器人在某一运动时刻t的质心坐 队控制主要工作是设计协同控制律使得各个智能体 标点为M(x,y),此时机器人的速度方向与x轴正 达到并保持给定的期望队形,对于领导者自身的运 方向的夹角为0,如图1所示。机器人在这一时刻 动轨迹往往并不关心[)。随着工程研究的广泛和 的位姿信息由向量q=(x,y,)I确定,机器人的运 深入,在利用多机器人执行编队任务(如多无人水 动信息由向量p=(v,w)T确定,其中v(t)和(t)分 下航行器水下地形测绘,多无人机编队协同打击 别表示机器人在t时刻的线速度和角速度。 等])时,若同时对领导者的运动轨迹加以限制,针 对不同的地形环境对领导者的运动轨迹进行合理规 划后使其沿给定轨迹运动,则可大大提高多机器人 系统编队协同控制在实际应用中的效率及适应和应 变能力。 许多学者做过关于编队控制和路径跟踪的研 究,文献[1]讨论了离散时间下的多机器人编队控 制,通过设计合理的控制律,使每个机器人的位姿信 息与前一个机器人的位姿信息之差收敛到给定期望 队形的编队向量来保证多智能体编队协同运动。文 X 献[14]中提到SBC控制,通过对当前机器人的运动 图1机器人运动学模型 信息加以控制,使当前机器人与参考机器人的相对 Fig.1 Kinematic model of the robot 距离和角度总保持在给定值来完成编队。目前在路 由图1知,机器人的运动学方程可表示为 径跟踪研究中,已有一些学者利用智能控制方法成 x=v·c0s(0) 功解决路径跟踪问题,文献[15]采用预测控制方法 y=v·sin(0) (1) 对机器人进行运动控制,使其达到跟踪给定路径目 的。文献[16]采用遗传控制算法,将机器人运动规 8=w 划转化为非线性控制系统的优化问题,通过不断优 将式(1)用向量形式可表示为g=R()p,其中 化机器人的运动轨迹来完成路径跟踪目的。 cose 0 针对轮式机器人模型高度非线性及运动学和动 R(8)= sin 0 1 (2) 力学模型不易确定等特点,本文采用了不依赖于系 10 统模型的模糊控制方法,通过不断调整机器人的控 1.2跟随者运动学模型 制输入来对每个子目标点实时跟踪,从而实现领导 设2个机器人在t时刻的线速度分别为,(t) 者沿整条期望轨迹运动。本文设计的模糊控制器控 和,(t),它们的运动方向与x轴正方向的夹角为 制规则简单明了,易于理解,且规则数较少,减少了素以及难以建立模型的被控对象,基于专家经验的 模糊控制具有较强的优势[6] 。 模糊控制中的模糊 逻辑是用人类的语言语句表达的,因此,它较为直 观,易于人们理解[7] 。 无论是在科学研究还是工程 实际运用上都逐渐被广泛应用[8⁃9] 。 但在实际工程 中模糊控制规则的制定没有统一的模式,往往需要 丰富的工程实践经验,因此模糊控制器设计较为困 难,且对设计人员的要求较高。 同时大量的模糊规 则使得存贮模糊规则库的计算机内存空间必须足够 大,这对于如单片机等内存有限的硬件系统而言,显 然无法满足其内存要求。 因此模糊控制系统在可应 用性、可移植性及扩展性上并不具备优势[10⁃11] 。 大多数基于领导⁃跟随方式的多机器人系统编 队控制主要工作是设计协同控制律使得各个智能体 达到并保持给定的期望队形,对于领导者自身的运 动轨迹往往并不关心[12] 。 随着工程研究的广泛和 深入,在利用多机器人执行编队任务(如多无人水 下航行器水下地形测绘,多无人机编队协同打击 等[13] )时,若同时对领导者的运动轨迹加以限制,针 对不同的地形环境对领导者的运动轨迹进行合理规 划后使其沿给定轨迹运动,则可大大提高多机器人 系统编队协同控制在实际应用中的效率及适应和应 变能力。 许多学者做过关于编队控制和路径跟踪的研 究,文献[1]讨论了离散时间下的多机器人编队控 制,通过设计合理的控制律,使每个机器人的位姿信 息与前一个机器人的位姿信息之差收敛到给定期望 队形的编队向量来保证多智能体编队协同运动。 文 献[14]中提到 SBC 控制,通过对当前机器人的运动 信息加以控制,使当前机器人与参考机器人的相对 距离和角度总保持在给定值来完成编队。 目前在路 径跟踪研究中,已有一些学者利用智能控制方法成 功解决路径跟踪问题,文献[15]采用预测控制方法 对机器人进行运动控制,使其达到跟踪给定路径目 的。 文献[16]采用遗传控制算法,将机器人运动规 划转化为非线性控制系统的优化问题,通过不断优 化机器人的运动轨迹来完成路径跟踪目的。 针对轮式机器人模型高度非线性及运动学和动 力学模型不易确定等特点,本文采用了不依赖于系 统模型的模糊控制方法,通过不断调整机器人的控 制输入来对每个子目标点实时跟踪,从而实现领导 者沿整条期望轨迹运动。 本文设计的模糊控制器控 制规则简单明了,易于理解,且规则数较少,减少了 对硬件的依赖,具有良好的可移植性和可扩展性。 同时,通过对每个跟随者与领导者之间的相对距离 l 和角度 φ 加以控制,使其收敛到给定值,以此完成编 队控制效果。 1 机器人模型 对于作为领导者的移动机器人而言,其运动学 模型只根据自身的位姿信息确定;而对于作为跟随 者的移动机器人,其运动学模型建立在与领导者的 位姿信息基础之上,通过与领导者的相对位置和角 度信息来间接描述其自身的位姿信息。 1.1 领导者运动学模型 设轮式移动机器人在某一运动时刻 t 的质心坐 标点为 M(x,y) ,此时机器人的速度方向与 x 轴正 方向的夹角为 θ ,如图 1 所示。 机器人在这一时刻 的位姿信息由向量 q = (x,y,θ) T 确定,机器人的运 动信息由向量 p = (v,w) T 确定,其中 v(t)和 w(t)分 别表示机器人在 t 时刻的线速度和角速度。 图 1 机器人运动学模型 Fig.1 Kinematic model of the robot 由图 1 知,机器人的运动学方程可表示为 x · = v·cos(θ) y · = v·sin(θ) θ · = w ì î í ï ïï ï ï (1) 将式(1)用向量形式可表示为 q · = R (θ) p ,其中 R(θ) = cosθ 0 sin θ 1 0 1 é ë ê ê êê ù û ú ú úú (2) 1.2 跟随者运动学模型 设 2 个机器人在 t 时刻的线速度分别为 v1(t) 和 v2(t) ,它们的运动方向与 x 轴正方向的夹角为 ·534· 智 能 系 统 学 报 第 10 卷