正在加载图片...
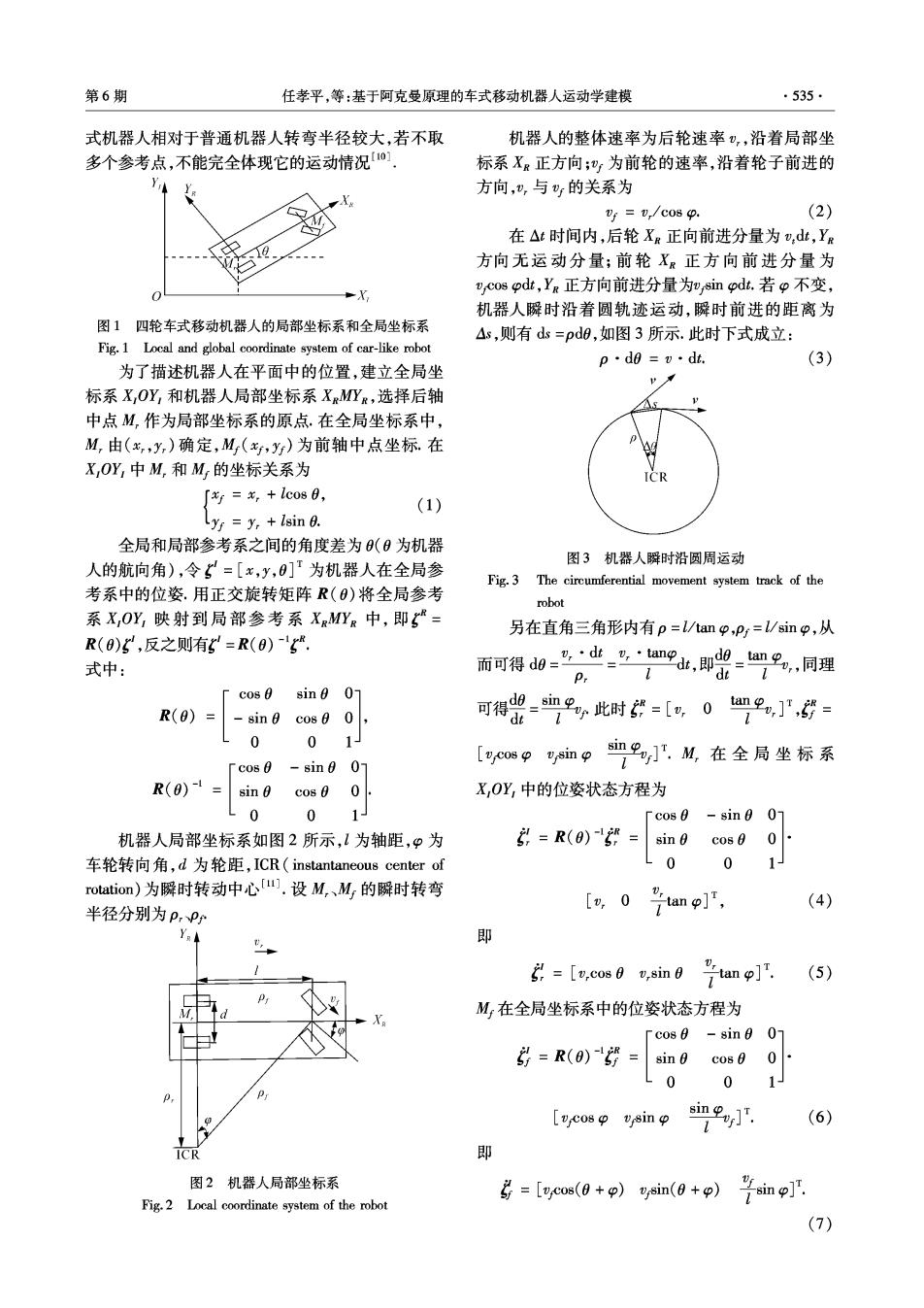
第6期 任孝平,等:基于阿克曼原理的车式移动机器人运动学建模 ·535· 式机器人相对于普通机器人转弯半径较大,若不取 机器人的整体速率为后轮速率),沿着局部坐 多个参考点,不能完全体现它的运动情况, 标系XR正方向;巴为前轮的速率,沿着轮子前进的 方向,”,与巴的关系为 y=,/c08p. (2) 在△t时间内,后轮Xg正向前进分量为,dt,Y 方向无运动分量:前轮XR正方向前进分量为 cos odt,YR正方向前进分量为v sin odt.若p不变, 机器人瞬时沿着圆轨迹运动,瞬时前进的距离为 图1四轮车式移动机器人的局部坐标系和全局坐标系 △s,则有ds=pd0,如图3所示.此时下式成立: Fig.1 Local and global coordinate system of car-like robot p·d0=v·dt. (3) 为了描述机器人在平面中的位置,建立全局坐 标系X,OY,和机器人局部坐标系XgMYR,选择后轴 中点M,作为局部坐标系的原点.在全局坐标系中, M,由(x,y,)确定,M(x,y)为前轴中点坐标.在 X,OY,中M,和M的坐标关系为 ∫y=x,+lco80, (1) Lys =y,lsin 0. 全局和局部参考系之间的角度差为(0为机器 图3机器人瞬时沿圆周运动 人的航向角),令=[x,y,0]为机器人在全局参 Fig.3 The circumferential movement system track of the 考系中的位姿.用正交旋转矩阵R(0)将全局参考 robot 系X,OY,映射到局部参考系XMYR中,即= 另在直角三角形内有p=l/amp,pr=l/sinp,从 R(0)E,反之则有E=R(0). 式中: 而可得d0=业-“吧,盟=只.同理 P. cos 0 sin0 07 R(0) = sin c080 0, 可得-血巴此时=[g,09,], dt 0 1 [v cos ysin 「cos0-sin00 巴,M,在全局坐标系 R(0)-4 sin 0 c0s00 X,OY中的位姿状态方程为 L 0 0 1J sin0 0- 机器人局部坐标系如图2所示,1为轴距,”为 :=R(0) sin 0 cos 0 车轮转向角,d为轮距,ICR(instantaneous center of 0 0 1 rotation)为瞬时转动中心).设M,、M的瞬时转弯 [,0 , ano], (4) 半径分别为p,Pr 1 即 5=[v,cos 0 v,sin 0 tan o]'. (5) M在全局坐标系中的位姿状态方程为 -cos 0 sin 00- =R(0) = sin 6 cos 0 0 L 0 0 1/ [vcos vsin 2 (6) ICR 即 图2机器人局部坐标系 Fig.2 Local coordinate system of the robot 号=[c(0+p)ysin(0+p)号inpj (7)