正在加载图片...
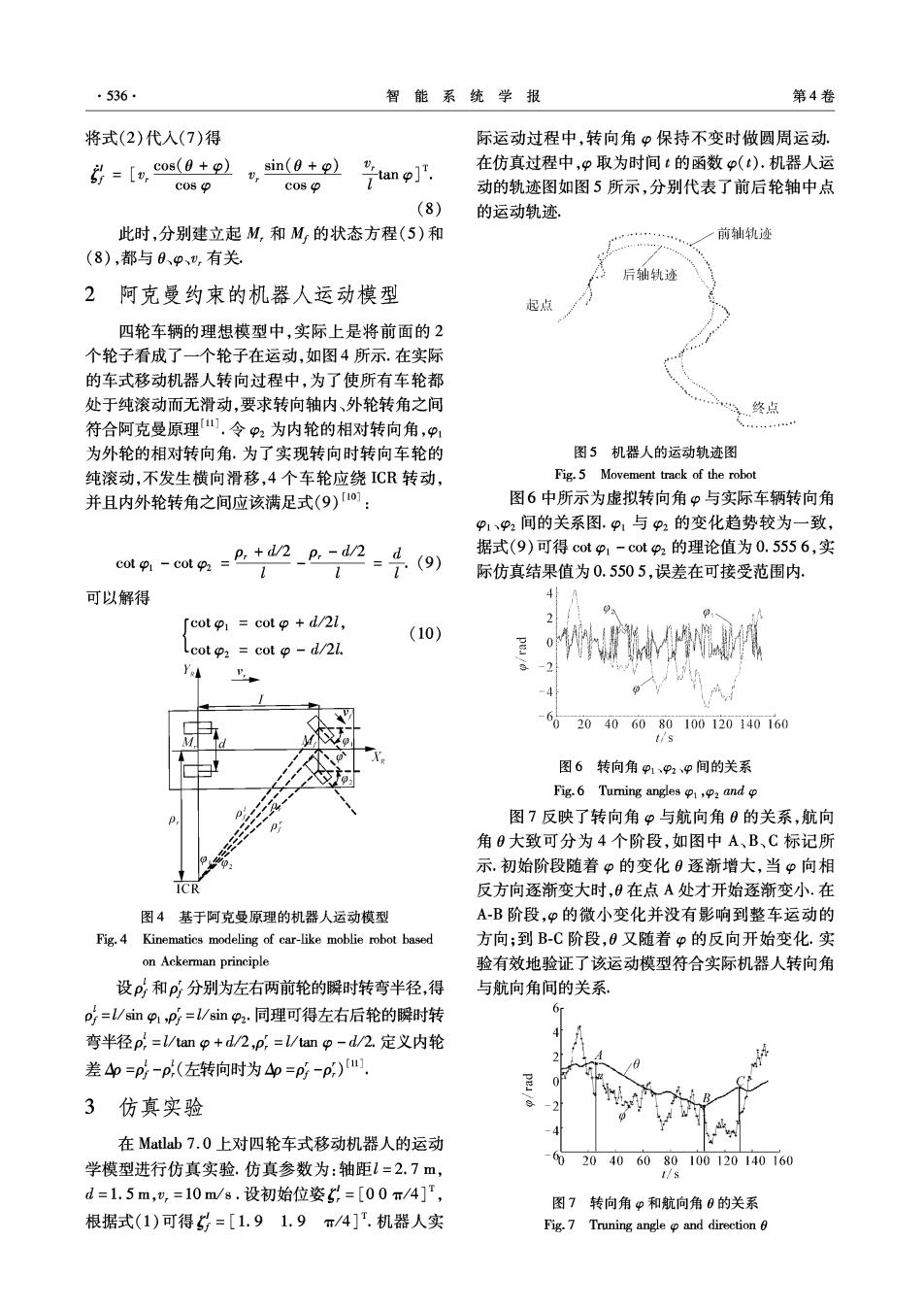
·536. 智能系统学报 第4卷 将式(2)代入(7)得 际运动过程中,转向角中保持不变时做圆周运动. =[,cos(0+22 sin(0+) 在仿真过程中,”取为时间t的函数p(t),机器人运 cos cos 名tanoJ. 动的轨迹图如图5所示,分别代表了前后轮轴中点 (8) 的运动轨迹。 此时,分别建立起M,和M的状态方程(5)和 1..... 前轴轨迹 (8),都与0、p、,有关 后轴轨迹 2阿克曼约束的机器人运动模型 起点 四轮车辆的理想模型中,实际上是将前面的2 个轮子看成了一个轮子在运动,如图4所示.在实际 的车式移动机器人转向过程中,为了使所有车轮都 处于纯滚动而无滑动,要求转向轴内、外轮转角之间 终点 符合阿克曼原理山.令2为内轮的相对转向角,p, 为外轮的相对转向角.为了实现转向时转向车轮的 图5机器人的运动轨迹图 纯滚动,不发生横向滑移,4个车轮应绕ICR转动, Fig.5 Movement track of the robot 并且内外轮转角之间应该满足式(9)10: 图6中所示为虚拟转向角φ与实际车辆转向角 p1、p2间的关系图.p1与p2的变化趋势较为一致, cotp,-coto2=P,+2-P,-,2=4.(9) 据式(9)可得cotp1-cotp的理论值为0.5556,实 际仿真结果值为0.5505,误差在可接受范围内. 可以解得 4 「cotp1=cotp+d/2l, (10) Lcot 2 cot o -d/21. 020406080100120140160 t/s 图6转向角p1P2p间的关系 Fig.6 Tumning angles ,2 and 图7反映了转向角”与航向角0的关系,航向 角0大致可分为4个阶段,如图中A、B、C标记所 示.初始阶段随着”的变化0逐渐增大,当φ向相 ICR 反方向逐渐变大时,0在点A处才开始逐渐变小.在 图4基于阿克曼原理的机器人运动模型 A-B阶段,”的微小变化并没有影响到整车运动的 Fig.4 Kinematics modeling of car-like moblie robot based 方向;到B-C阶段,0又随着p的反向开始变化.实 on Ackerman principle 验有效地验证了该运动模型符合实际机器人转向角 设p和p分别为左右两前轮的瞬时转弯半径,得 与航向角间的关系。 p=l/sinp1,p=l/sinp2,同理可得左右后轮的瞬时转 弯半径p.=l/anp+d/2,p,=l/tanp-d/2.定义内轮 差0=p-p(左转向时为p=p-p,). 3仿真实验 在Matlab7.0上对四轮车式移动机器人的运动 学模型进行仿真实验.仿真参数为:轴距l=2.7m, 020406080100120140160 t/s d=1.5m,v,=10m/8.设初始位姿,=[00π/4], 图7转向角p和航向角0的关系 根据式(1)可得=[1.91.9π/4].机器人实 Fig.7 Truning angle o and direction 6