正在加载图片...
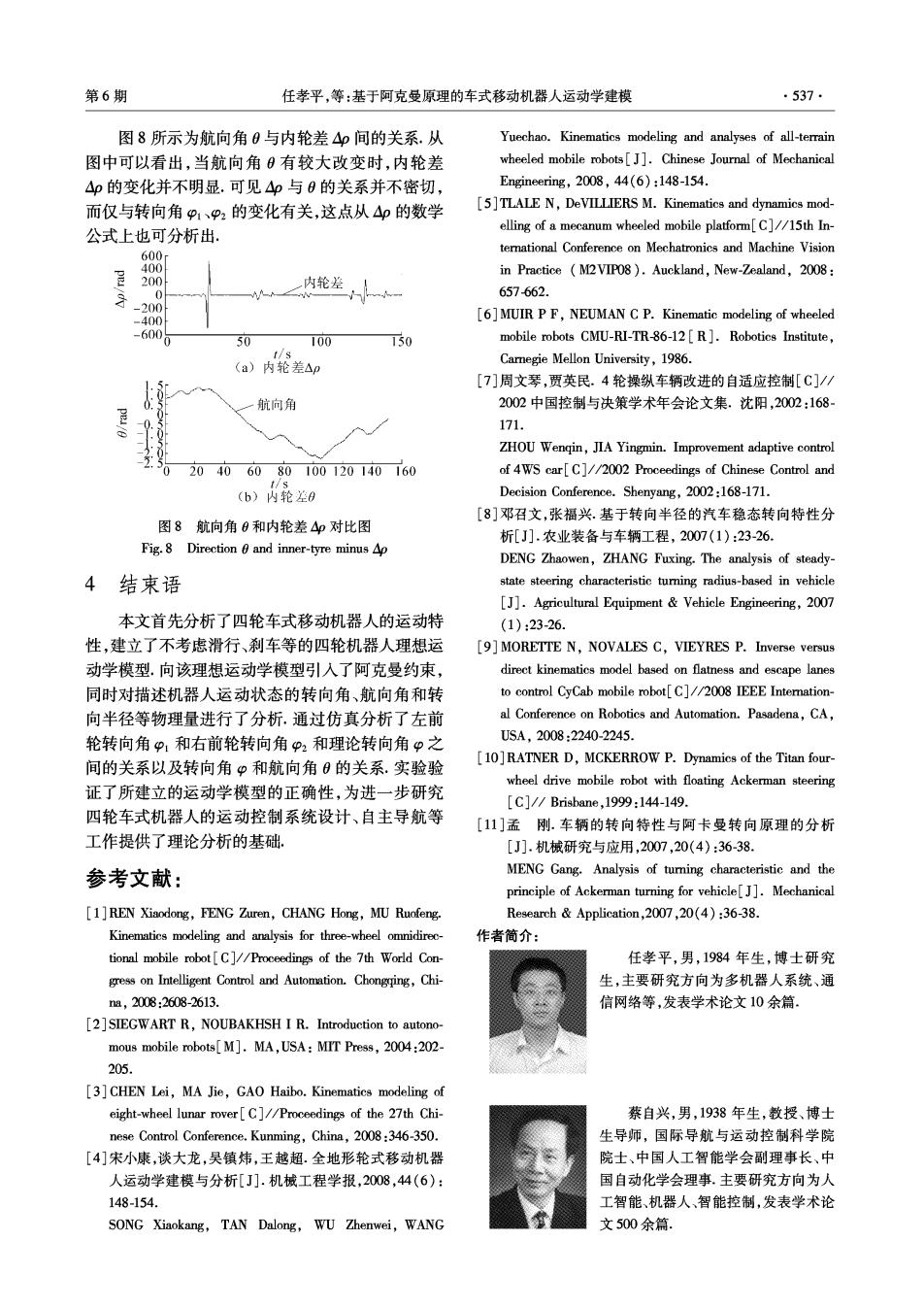
第6期 任孝平,等:基于阿克曼原理的车式移动机器人运动学建模 537 图8所示为航向角0与内轮差△p间的关系.从 Yuechao.Kinematics modeling and analyses of all-terrain 图中可以看出,当航向角0有较大改变时,内轮差 wheeled mobile robots[J].Chinese Journal of Mechanical 4p的变化并不明显.可见4p与0的关系并不密切, Engineering,2008,44(6):148-154. 而仅与转向角p、P2的变化有关,这点从△p的数学 [5]TLALE N,DeVILLIERS M.Kinematics and dynamics mod- 公式上也可分析出. elling of a mecanum wheeled mobile platform[C]//15th In- terational Conference on Mechatronics and Machine Vision 600 400 in Practice (M2VIP08).Auckland,New-Zealand,2008: 200 内轮差 657-662. -200 [6]MUIR P F,NEUMAN C P.Kinematic modeling of wheeled =40 -600 0 50 100 T50 mobile robots CMU-RI-TR-86-12 R].Robotics Institute, t/s (a)内轮差△p Caregie Mellon University,1986. [7]周文琴,贾英民.4轮操纵车辆改进的自适应控制[C]// 航向角 2002中国控制与决策学术年会论文集.沈阳,2002:168 171. ZHOU Wenqin,JIA Yingmin.Improvement adaptive control 20406080100120140160 of 4WS car[C]//2002 Proceedings of Chinese Control and T/S (b)内轮差0 Decision Conference.Shenyang,2002:168-171. [8]邓召文,张福兴.基于转向半径的汽车稳态转向特性分 图8航向角8和内轮差△p对比图 析J].农业装备与车辆工程,2007(1):23-26. Fig.8 Direction 0 and inner-tyre minus Ap DENG Zhaowen,ZHANG Fuxing.The analysis of steady- 4结束语 state steering characteristic turing radius-based in vehicle [J].Agricultural Equipment Vehicle Engineering,2007 本文首先分析了四轮车式移动机器人的运动特 (1):23-26. 性,建立了不考虑滑行、刹车等的四轮机器人理想运 [9]MORETTE N,NOVALES C,VIEYRES P.Inverse versus 动学模型.向该理想运动学模型引入了阿克曼约束, direct kinematics model based on flatness and escape lanes 同时对描述机器人运动状态的转向角、航向角和转 to control CyCab mobile robot[C]//2008 IEEE Interation- 向半径等物理量进行了分析.通过仿真分析了左前 al Conference on Robotics and Automation.Pasadena,CA. 轮转向角”,和右前轮转向角P2和理论转向角P之 USA,2008:2240-2245. 间的关系以及转向角φ和航向角0的关系.实验验 [10]RATNER D,MCKERROW P.Dynamics of the Titan four- wheel drive mobile robot with floating Ackerman steering 证了所建立的运动学模型的正确性,为进一步研究 [C]//Brisbane,1999:144-149. 四轮车式机器人的运动控制系统设计、自主导航等 [11]孟刚.车辆的转向特性与阿卡曼转向原理的分析 工作提供了理论分析的基础。 [J].机械研究与应用,2007,20(4):36-38. 参考文献: MENG Gang.Analysis of turning characteristic and the principle of Ackerman turning for vehicleJ].Mechanical [1]REN Xiaodong,FENG Zuren,CHANG Hong,MU Ruofeng. Research Application,2007,20(4):36-38. Kinematics modeling and analysis for three-wheel omnidirec- 作者简介: tional mobile robot [C]//Proceedings of the 7th World Con- 任孝平,男,1984年生,博士研究 gress on Intelligent Control and Automation.Chongging,Chi- 生,主要研究方向为多机器人系统、通 na,2008:2608-2613. 信网络等,发表学术论文10余篇. [2]SIEGWART R,NOUBAKHSH I R.Introduction to autono- mous mobile robots[M].MA.USA:MIT Press,2004:202- 205. [3]CHEN Lei,MA Jie,GAO Haibo.Kinematics modeling of eight-wheel lunar rover[C]//Proceedings of the 27th Chi- 蔡自兴,男,1938年生,教授、博士 nese Control Conference.Kunming,China,2008:346-350. 生导师,国际导航与运动控制科学院 [4]宋小康,谈大龙,吴镇炜,王越超.全地形轮式移动机器 院士、中国人工智能学会副理事长、中 人运动学建模与分析[J].机械工程学报,2008,44(6): 国自动化学会理事.主要研究方向为人 148-154 工智能、机器人、智能控制,发表学术论 SONG Xiaokang,TAN Dalong,WU Zhenwei,WANG 文500余篇