正在加载图片...
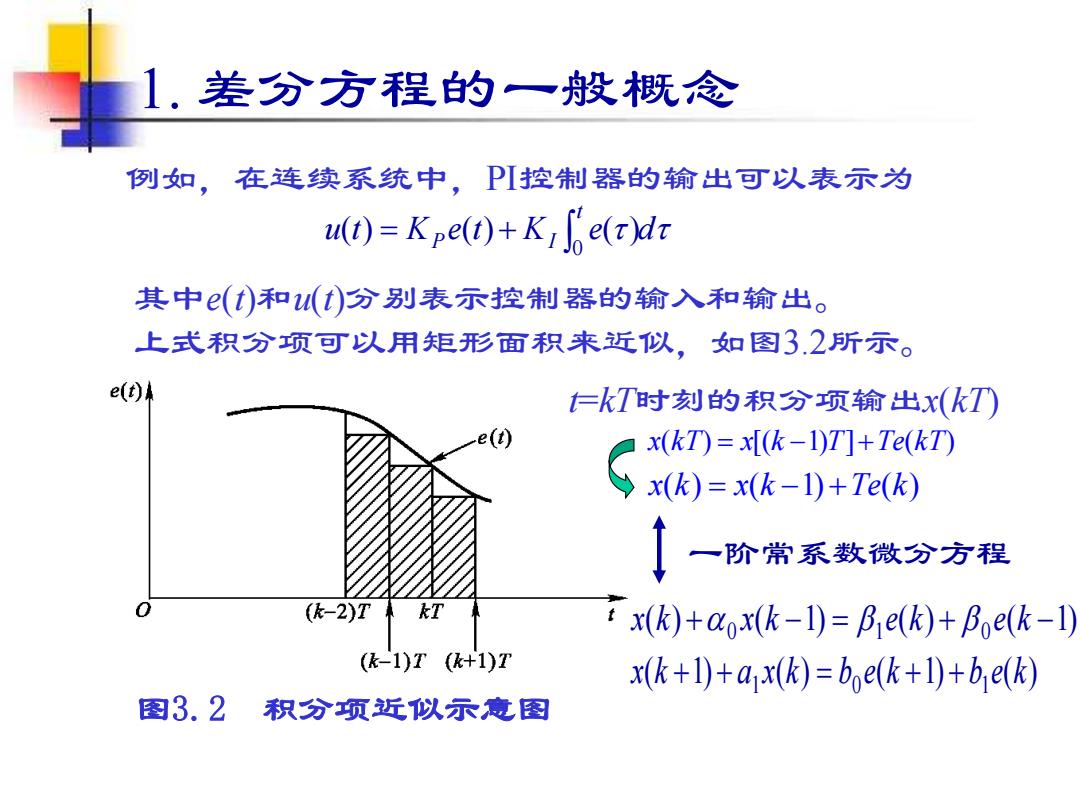
1.差分方程的一般概念 例如,在连续系统中,PI控制器的输出可以表示为 u(t)=Kpe()+KIe(dr 其中(t)和u(t)分别表示控制器的输入和输出。 上式积分项可以用矩形面积来近似,如图3.2所示。 e(t) 仁kT时刻的积分项输出x(kT) x(kT)=x[(k-1)T]+Te(kT) x(k)=x(k-1)+Te(k) 一阶常系数微分方程 (k-2)T kT x(k)+aox(k-1)=Be(k)+Boe(k-1) (k-1)T(k+1)T x(k+1)+ax(k)=boe(k+1)+be(k) 图3.2 积分须近以示意图1. 差分方程的一般概念 例如,在连续系统中,PI控制器的输出可以表示为 u t K e t K e d t P I = + 0 ( ) ( ) ( ) 其中e(t)和u(t)分别表示控制器的输入和输出。 上式积分项可以用矩形面积来近似,如图3.2所示。 图3.2 积分项近似示意图 x(kT) = x[(k −1)T]+Te(kT) t=kT时刻的积分项输出x(kT) x(k) = x(k −1) +Te(k) ( ) ( 1) ( ) ( 1) x k + 0 x k − = 1 e k + 0 e k − ( 1) ( ) ( 1) ( ) 1 0 1 x k + + a x k = b e k + + b e k 一阶常系数微分方程